


 下载:
下载:


-
开放科学(资源服务)标识码(OSID):

-
随着全球人口的增长以及环境污染的加剧,农作物供应面临着前所未有的压力,而病虫害、干旱、高温等生物和环境胁迫显著降低了作物的产量,并造成了巨大的经济损失[1-2]. 因此,植物生长状态动态监测对农业生产指导具有重要意义. 目前,人工检查及高光谱成像等无创监测方法已经被广泛使用[3-5],但在实际应用中存在连续性及实时性较差、早期胁迫症状表述不清和精度低等缺陷. 近年来,柔性电子技术得到大力发展,被广泛应用到人体健康数据监测、医疗监测和智能治疗设备中,实现了人体体征的实时监测. 因此,将柔性电子技术应用于植物监测,有望解决农业监测中遇到的问题,实现对植物生长状态的实时动态监测[6-7]. 然而,植物表面的微尺度特征远比人类表皮丰富,且随着生长,其表型变化范围远大于人类表皮. 植物微尺度特征变化细微且持续,加之农作物生长环境复杂,面临高温、低温、降雨等恶劣环境,因此对可穿戴传感器提出了兼具高灵敏度、可大变形和高稳定性的要求[8].
研究表明,生物体表面的特殊功能主要取决于其表面的微纳结构. 例如,鱼鳞的层状结构[9-10]、蜘蛛网状结构以及木纤维结构等[11-12],它们展现出了各自独特的特性,包括超疏水性、耐磨减摩性,以及超拉伸性等[13-16],利用这些特性能够极大提高传感器的应用适应性和传感性能. 2014年,Kang等[17]首次报道了一种基于蜘蛛体表感受器裂缝结构的柔性应变传感器,证明了基于纳米级裂纹的传感器可以用于感知极其微小的机械应变和振动. Zhang等[18]受植物卷须启发,制备了具有蛇形结构的植物可穿戴传感器,实时反映番茄植株的生长状况和水分状况. 此外,受蜘蛛网的放射线与螺旋线结构启发,Wang等[19]通过两次反向倒模方法,利用PDMS弹性材料构建了一种新型柔性触觉传感器,该传感器具有超高的灵敏度和快速的响应时间,可应用于监测人体运动. 综上所述,基于微纳仿生结构制备的柔性传感器可实现高灵敏、大变形和高稳定性的要求,但目前其制备方法大多涉及预拉伸、光刻、反向倒模等工艺,制备成本较高,因此,实现可穿戴植物传感器的低成本和大规模生产还存在一定的挑战.
针对上述问题,受蝎子缝感受器的启发,本文开发了一种可规模化生产且成本低廉的制备工艺,模拟蝎子步足上的缝感受器超灵敏形态结构,在柔性衬底上刻画微米级“缝感受器”,实现可穿戴植物传感器高灵敏度、大变形和高稳定性的需求,并开发无线传输系统,实现对柠檬生长的连续和实时监测,验证了该传感器对植物生长状态动态监测的可行性.
全文HTML
-
聚对苯二甲酸乙二醇酯(PET)薄膜购自巨邦塑料材料有限公司,薄膜厚度为150 μm;银(Ag)购自武汉普迪真空科技有限公司,纯度为99.99%.
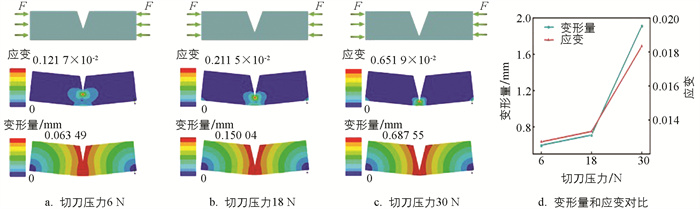
该可穿戴植物传感器的灵感源于蝎子步足跗骨关节处的缝感受器,能感知到20 cm外昆虫的行走或者一粒沙子落在跗骨5 cm以内发出的轻微震动. 当振动源轻微作用时,振动以机械波的形式在地面介质中传播,蝎子的跗骨首先接收到机械波并挤压受体产生生物电信号,从而赋予蝎子超强的感知能力[20]. 受蝎子缝感受器的启发,在应变传感器的设计中引入了类似的V形凹槽结构. 为了对比不同尺寸V形凹槽的力学性能,分别建立切刀压力为6,18,30 N的V形凹槽模型,在相同的边界条件下,用Ansys有限元分析软件分别模拟了它们的变形量和应变. 有限元仿真分析结果如图 1所示.
由图 1可知,随着切刀压力增大,模型的变形量和应变也随之增大,切刀压力为30 N的模型具有最大的变形量和应变值,分别为0.687 55 mm和0.651 9×10-2. 应变传感器的传感机制主要取决于隧穿效应,当对传感器施加外部应力时,V形凹槽内导电金属颗粒的距离会发生变化,传感器的电阻也会相应变化,因此,变形量越大,其传感能力越强,后续测试结果与仿真结果一致. 同时,为了使该传感器具有感知来自各个方向振动的能力,将凹槽结构设计为圆弧状并沿环形分布.
-
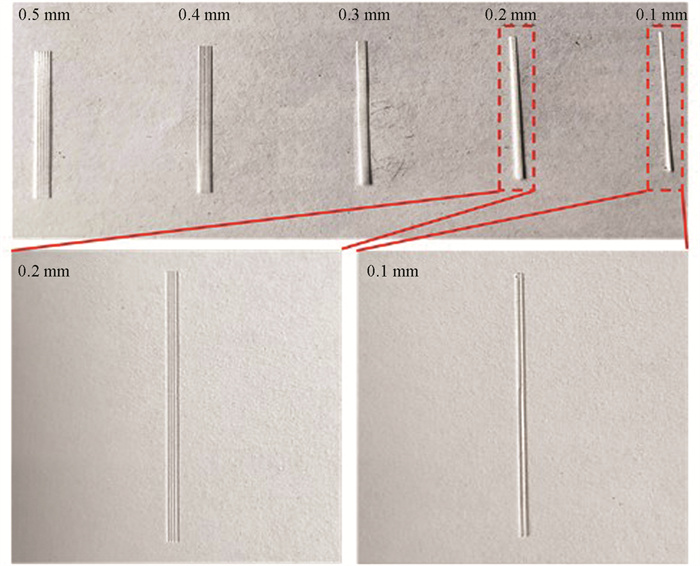
在V形凹槽制备之前,需要判断所用的商用刻字机的切割精度是否满足要求,即V形凹槽结构相互独立. 为了便于观察比较,以直线裂纹取代弯曲裂纹进行试验,令两相邻的直线裂纹的距离为变量,由0.5 mm到0.1 mm逐渐减小,制备如图 2所示的直线PET模板,观察各个试验模板的结构清晰程度.
对比发现,直线裂纹之间的距离从0.5 mm减小到0.2 mm,样品两条裂纹相互独立,当两裂纹之间距离为0.1 mm时,两裂纹发生交叉干涉. 为避免因偶然误差对试验结果的影响,进行多次重复试验,在间距为0.1 mm时,两直线裂纹依旧存在干涉,即该刻字机的最大切割精度为0.2 mm. 本文介绍的传感器两条相邻V形凹槽之间的最小距离为0.45 mm,该刻字机的切割精度满足预期结构的制备要求,能够保证微观结构和导电网络的完整性和独立性.
-
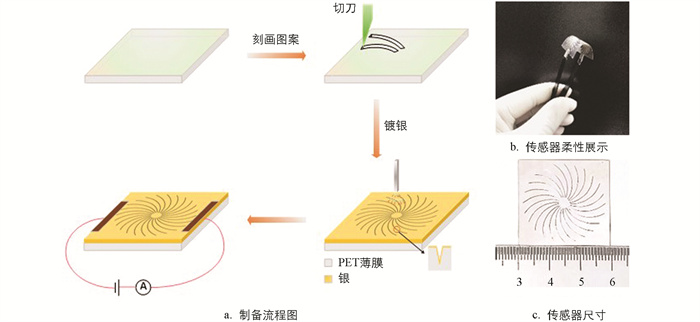
制备过程如图 3所示. 首先将PET薄膜放入商用乙烯基刻字机(CAMEO 4,美国),将预先设计的CAD图案发送至刻字机,设置刻字机参数并启动,在PET薄膜上雕刻环形分布的V形凹槽. 最后切下尺寸为30 mm×30 mm,表面带有微结构的PET薄膜,将其贴附于基片上,放入热真空蒸发镀膜设备机(PD-300,武汉普迪真空科技有限公司)真空舱内进行抽真空操作,使舱内气压达到1×10-3Pa以下,设置镀膜温度后开始镀膜. 观察膜厚仪,当PET表面银层厚度达到120 nm,停止镀膜并释放真空,取出样品后在两端连接铜导线后,得到可穿戴植物传感器.
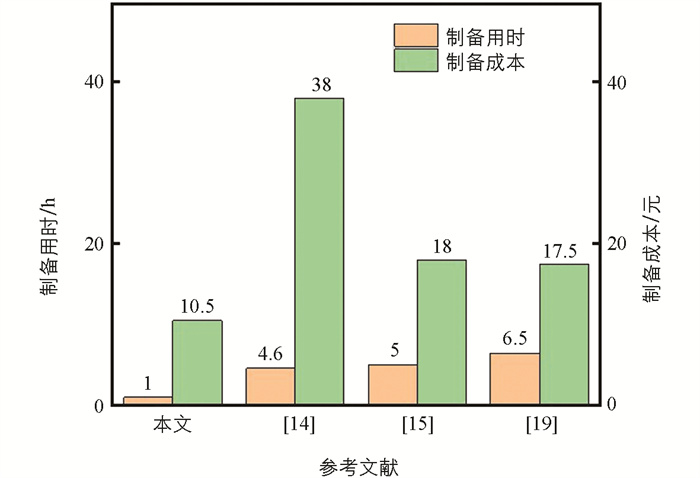
如图 4所示,与参考文献[14-15, 19]中提出的3种常见传感器制备方法比较,本文采用商用乙烯基刻字机在聚对苯二甲酸乙二醇酯(PET)薄膜表面直接构造微结构的方法,具有最低的制备时间和成本. 除此之外,刻字机单次可对多个样品进行微结构的构造. 在镀膜环节和基片上也可同时贴附多个样品,从而实现多个样品同时镀膜. 此制备方法在具有微米级精度的同时,大大降低了制备成本和时间成本,可以实现可穿戴植物传感器的大规模、低成本制备.
1.1. 材料选择及结构设计
1.2. V形凹槽制备精度
1.3. 样品制备
-
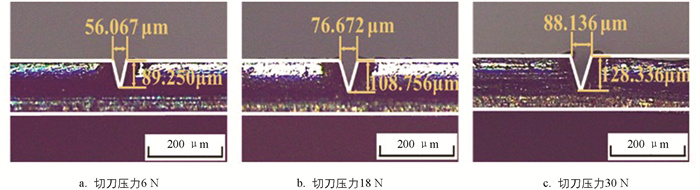
利用光学显微镜(DM2700,徕卡,德国)对传感器的V形凹槽截面进行微观形貌观察与尺寸分析. 图 5a-图 5c分别是切刀深度为1(切刀最大深度为1 mm,被分为10个等级,即切刀深度为1时,实际深度为0.1 mm),切刀压力分别为6,18,30 N时V形凹槽的微观结构,随着切刀压力的增大,V形凹槽的宽度与深度也会增加,表 1为V形凹槽的宽度和高度随切刀压力的变化情况. 根据这一趋势,可以通过调整切刀的参数来获得所需的V形凹槽尺寸,从而确保V形凹槽尺寸的可控性.
-
为了对比不同V形凹槽尺寸和不同厚度导电银层对传感器传感性能的影响,制备了一系列不同参数的可穿戴植物传感器,使用电化学工作站(CHI660E,上海辰华仪器有限公司)对其进行性能测试,筛选出最优性能的样品,为后续实验提供参数.
保持切刀深度为1,制备切刀压力分别为6,18,30 N的样品,镀银层厚度为120 nm,并分别对其进行性能测试,结果如图 6所示. 从图中可知,随着切刀压力的增加,样品的电阻变化越明显,即灵敏度更高. 切刀压力为30 N的样品表现出的ΔR/R0值最高,即具有最优灵敏度.
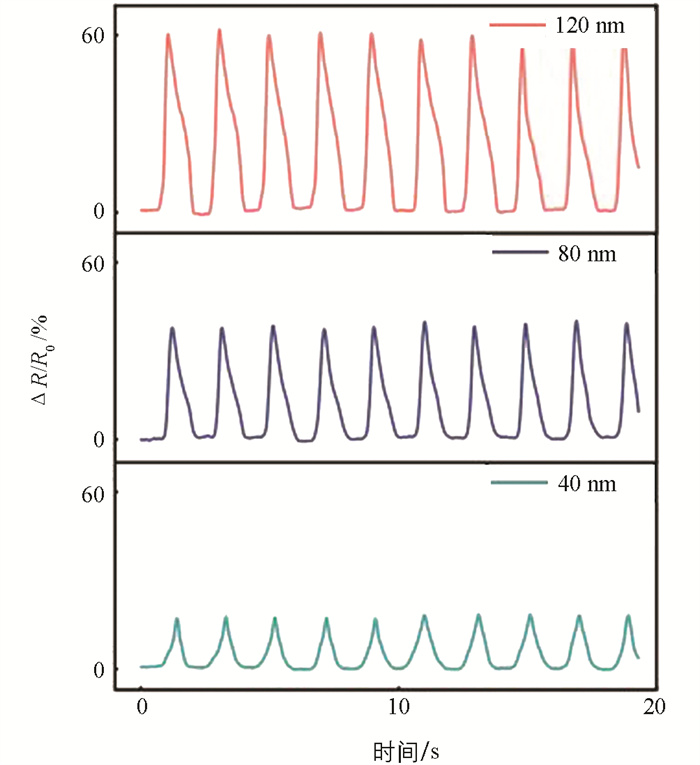
保持切刀压力为30 N,分别制备导电层厚度为40,80,120 nm的样品并进行性能测试,其结果如图 7所示. 从图 7可以看出,随着导电层厚度的增加,样品表现出的ΔR/R0值也随之增加,且导电银层为120 nm的样品具有最优灵敏度.
综上所述,选取切刀压力为30 N,银层厚度为120 nm进行后续样品制备.
-
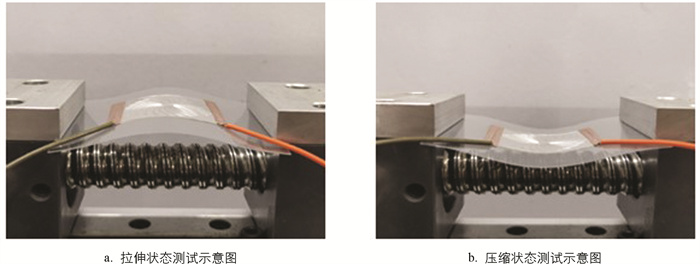
传感器的性能参数主要有灵敏度、响应时间和循环稳定性. 性能测试装置如图 8所示,将两侧连接了铜胶带的传感器固定在两个夹具之间,右夹具固定不动,左夹具与丝杆连接,丝杆的速度和行程由可编程控制器控制,从而带动左夹具移动. 其中,图 8a为传感器处于拉伸状态时的测试示意图;图 8b为传感器处于压缩状态时的测试示意图. 传感器的性能可以通过该装置模拟其工作条件来测试.
灵敏度是传感器最重要的性能指标之一,由GF表示,计算公式为:
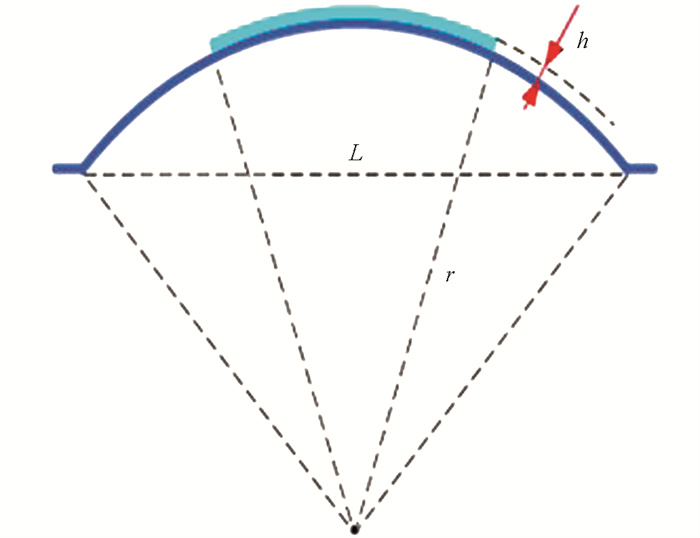
式中:R0为传感器的初始电阻,Ω;ΔR为传感器工作的瞬时电阻R与初始电阻R0之间的差值,Ω;Δε为施加在传感器上的应变量. 通过测量传感器的厚度(h)和弯曲时传感器的相应曲率半径(r),可以从图 9所示的示意图中计算出施加的应变量:
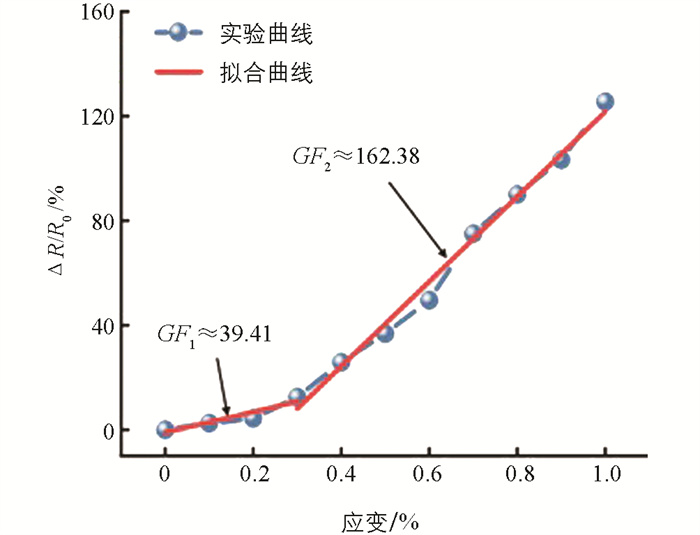
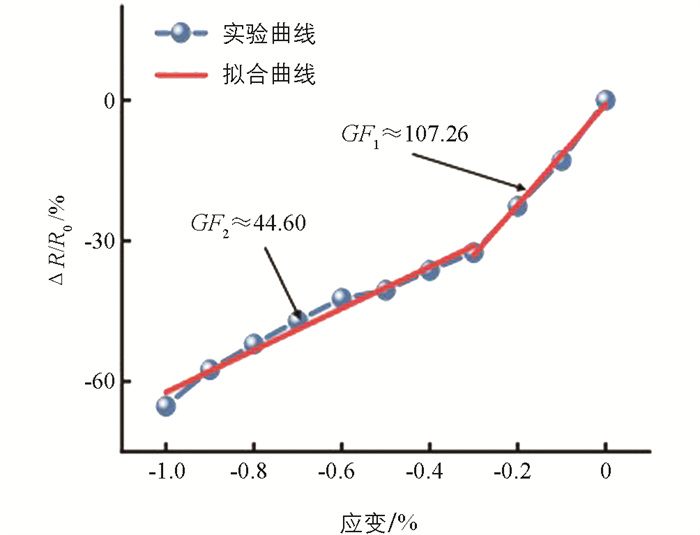
在拉伸状态下,传感器在不同应变下的相对电阻变化如图 10所示. 通过拟合电阻变化和应变曲线,可以将整个传感过程的电阻变化分为两个阶段. 当施加的应变范围为0%至0.3%时,GF值为39.41. 当应变继续增加,即在0.3%至1.0%的范围内,GF值升高至162.38,表明传感器在这一应变区间内的灵敏度更高. 如图 11所示,压缩状态下,应变为负值,整个传感过程的电阻变化也可以分为两个阶段. 在-1%至-0.3%的应变范围内,GF值为44.6. 在-0.3%至0%的应变范围内,GF值降低至107.26.
在现有文献中,纸基直线凹槽结构的柔性传感器展现出了263.34的灵敏度[21],而基于裂纹结构、以银作为导电材料的传感器则达到了30的灵敏度[22]. 与这些报道相比,本研究设计并制备的可穿戴植物传感器在灵敏度方面表现出色,满足了高灵敏度的要求,显示出其在传感性能上的优势.
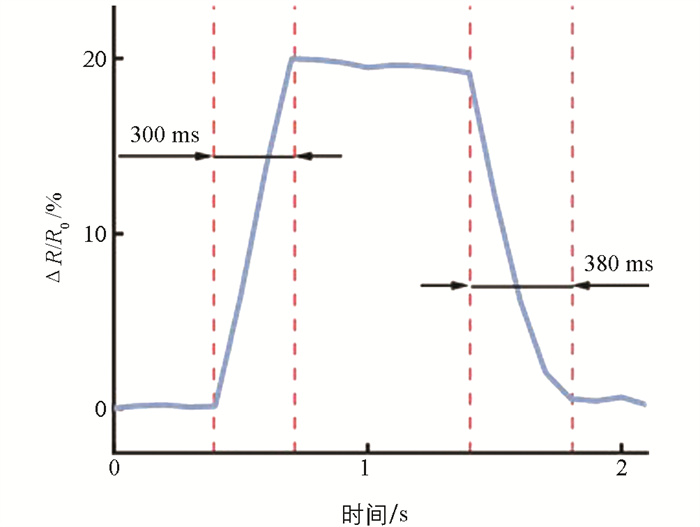
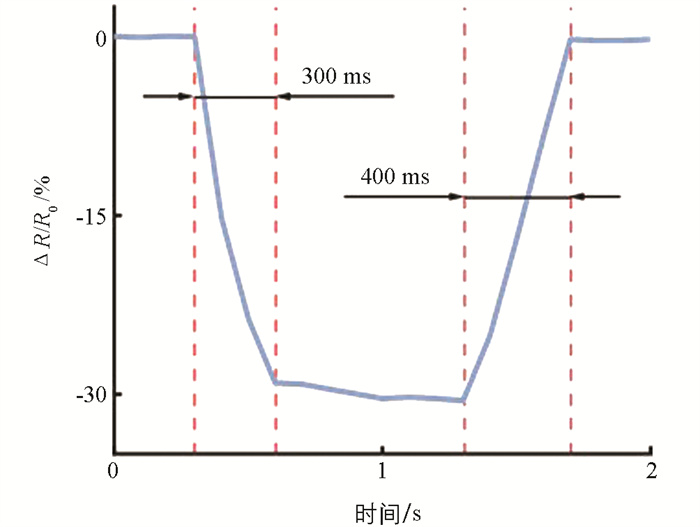
响应时间是判断传感器实时响应速度的重要标准,表现为传感器施加和撤除外界激励时,输出信号达到稳态所需的时间. 通常,柔性应变传感元件的响应滞后是由于聚合物材料具有粘弹性,在外力消除后,微观结构之间仍然存在残余应力,难以及时恢复初始状态. 如图 12所示,施加0.3%应变,在拉伸状态下的响应时间为300 ms,恢复时间为380 ms. 压缩状态下的响应时间曲线如图 13所示,响应时间为300 ms,恢复时间为400 ms.
短的响应时间使柔性应变传感器能够快速检测激励信号,并在受到外部快速激励时将其转换为电信号输出,这在实际应用中至关重要. 与现有报道中基于裂纹结构及含有离子水凝胶和银纳米纤维(AgNFs)的电容式应变传感器展现出320 ms的响应时间[22]和可拉伸纤维的碳纳米管—聚合物复合芯展现出的295 ms的响应时间[23]相比,本文制备的可穿戴植物传感器简单、高效,具备与复杂工艺传感器可比的快速响应的性能,能够满足植物动态监测的需求.
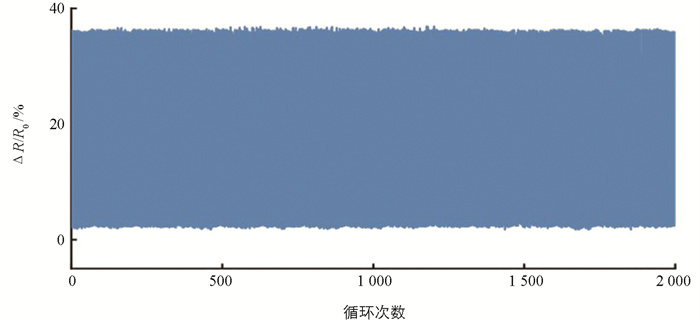
循环稳定性也是应变传感元件的重要性能指标之一,可以直观地表现出传感器的循环寿命. 在拉伸状态下,测试传感器在0.4%外加应变下拉伸释放的循环曲线. 循环稳定性测试结果如图 14所示,由图 14可以看出,该传感器具有超过2 000次的循环稳定性,并且在工作中没有明显的电阻信号漂移现象. 与现有报道中基于裂纹结构的传感器5 000次[24]和2 000次[25]的循环寿命相比较,本文设计制备的可穿戴植物传感器满足高循环稳定性的要求.
利用扫描电子显微镜(SEM)对V形凹槽弯曲循环前后微观形貌进行分析. 未进行弯曲循环、弯曲循环10次、弯曲循环1 000次和弯曲循环3 000次后V形凹槽底部的局部微观形貌分别如图 15a-图 15d所示. 对传感器进行弯曲循环之前,V形凹槽底部银层均匀分布,在对其进行10次弯曲循环后,由于应力作用,V形凹槽两侧对底部导电金属材料进行挤压,导致底部导电金属层出现不规则的裂缝. 当弯曲循环次数达到1 000次,裂缝尺寸变大,当循环次数达到3 000次,V形凹槽底部的裂缝与前者相比未见明显变化,与循环测试结果一致,说明该传感器具有较高的循环稳定性.
2.1. 形貌特征分析
2.2. 参数性能对比
2.3. 传感性能分析
-
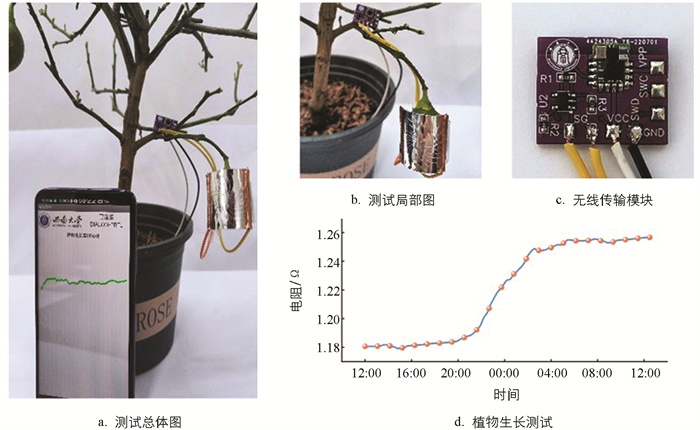
由于该可穿戴植物传感器具有良好的适应性和灵敏度,我们将其贴合在植物表面,研究了其实时监测植物生长状态的应用潜力. 随着植物的生长,其尺寸不断增大,导致传感器的应变增大,电阻值也会随之变化. 如图 16所示,为验证可穿戴植物传感器的实际应用能力,将传感器紧密地贴附于柠檬表面,实时监测其生长状态. 同时,开发了一种能够远程采集和传输数据的无线系统,利用分压电路监测传感器的电压值,并通过低功耗蓝牙传输电压信号.
该传感器展现出良好的柔性和适应性,与柠檬贴合良好,可用于实时监测农作物生长. 柠檬在直径方向上的生长会使传感器受到拉伸力,引起电阻的变化. 根据电阻变化的趋势和速率,可以推断出植物的生长趋势. 同时,开发如图 16c所示的蓝牙传输模块,在电源和地之间,可穿戴植物传感器与一定值电阻串联,形成分压电路. 传感器两端的电压经放大器放大并发送到数模转换端口,经过数模转换,获得放大后的传感器分压. 传感器两端的实时电压值通过低功耗蓝牙(BLE)发送至手机应用程序后,在手机屏幕上显示数据点. 在连接检测和无线传输电路后,连续监测24小时,并记录传感器的电压数据. 最后,将电压数据整理成电阻变化曲线,如图 16d所示.
在电阻变化曲线中,斜率表示电阻的变化率,即柠檬的生长速度. 从电阻变化曲线中可以看出,该传感器对植物生长的监测是连续的,并且表明柠檬在夜间(20:00到06:00)的生长速度明显高于其在白天(6:00-12:00和12:00-20:00)的生长速度. 白天的温度高、光照强,植物吸收的水分大多从其表面以气态方式向外界散失,柠檬无明显生长;而夜晚的温度和光照明显低于白天,植物吸收的水分用于自身生长[26-28]. 这一生长趋势与已有研究一致. 因此,该传感器能够实现对植物生长的实时监测,验证了其对植物生长状态动态监测的可行性.
-
本文通过模拟蝎子步足的缝感受器构造了V形裂纹微观结构,成功制备了一种可用于植物生长实时监测的可穿戴植物传感器. 在减少制备时间,实现低成本、大规模制备的同时,还兼具高灵敏度、高循环稳定性. 当施加应变在0.3%至1%时,该可穿戴植物传感器表现出162.38的灵敏度、300 ms的响应时间以及超过2 000次的优异循环稳定性. 除此之外,通过开发无线传输单元,实现在手机上对植物生长状态的连续实时无线监测,为监测植物生长状态提供了一种可行的方法,在农作物生长实时监测领域具有广阔的应用前景.