


 下载:
下载:
-
开放科学(资源服务)标志码(OSID):

-
电机是各行各业乃至家庭生活中不可或缺的一部分,因此,电机发生故障可能会导致严重的生产事故并造成巨大的经济损失,如果能及时发现故障并进行准确的预警及维护修理,将可以在很大程度上避免由此带来的经济损失和可能造成的社会问题. 目前,电机故障检测与诊断方法主要有基于模型的方法、基于信号处理的方法以及基于机器学习理论的方法. 基于模型的方法[1]主要是通过构造电机正常运行状态下的数学模型,设计故障诊断算法来监控电机系统的实际输出与模型预测输出之间的一致性[2],其模型参数与物理系数是一对一的映射,这类方法虽然检测速率较快,但是由于使用的模型比较单一,普适性较差;基于信号处理的方法通常是采用信号处理技术对电机信号进行分析,包括时域分析法[3]、频域分析法[4]、加强型频域分析法[5]以及时频域结合[6]等分析方法,这类分析方法通常不需要建立系统模型,而是借助各种信号处理工具对信号进行分析并判断故障类型,但是在环境比较复杂的情况下,多种类型的噪声信号会加大电机信号处理的难度,同时还需要具备一定经验的专家,因此这类方法的泛化能力较差;基于机器学习的方法在对电机信号进行适当的预处理后直接作为神经网络的输入,使用卷积神经网络(convolutional neural network,CNN)对电机信号类型进行分类训练学习,经过训练后的检测网络可以对电机可能发生的故障进行监测及准确分类,这类方法不需要建立系统模型和人工提取特征信息,且故障检测准确率较高,因此得到了广泛的研究和应用,同时经过不断地改进,其检测速率和精度也在不断地提高.
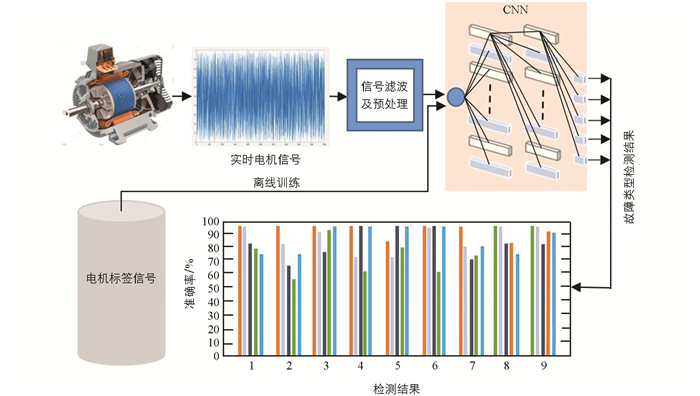
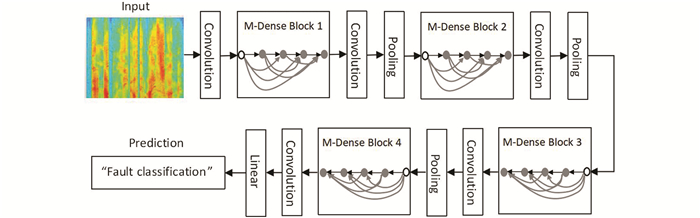
CNN是前馈式具有网状结构的神经网络模型,其结构模型通常为卷积层和池化层交替连接,通过神经网络节点将输入数据转换成易于识别的特征信息,具有强大的特征提取能力及高精度分类能力[7-8]. 文献[9]利用神经网络诊断感应电机的定子故障,其数据集包含13个训练数据集和9个验证数据集,电机故障的预测误差小于2.4%;文献[10]通过对电机故障信号的时频域特征信息进行分析,并使用不同的神经元进行验证,平均检测准确率可以达到96.25%;文献[11]根据电机端子的实时电压、电流信息,通过对神经网络的调整及优化,可以检测不同额定功率的电机故障,并达到了93%以上的检测精度. 以上这些算法都是通过手工提取并分类特定的故障数据类型,神经网络模型在测试及验证时能达到较高的准确率,但是在复杂的环境下,尤其是在电机信号的信噪比(signal-to-noise ratio,SNR)较小的情况下,电机的特征信号难以提取,实时性较差. 文献[12]提出的压缩与激励网络(Squeeze-and-Excitation Network,SENet)通过使用一个小型的子网络对输入数据进行特征分析,根据数据的重要程度获得一组权重,然后将这组权重与各个通道的特征信息分别相乘,以调整各个通道特征值的大小,是一种比较新颖的注意力机制下的深度学习方法;文献[13]提出的深度残差收缩网络(deep residual shrinkage network,DRSN)是一种能够处理含有噪声数据的深度学习方法,使用收缩(也即软阈值化)网络对复杂信号进行降噪处理,通过采用注意力机制自动设置阈值参数,避免了需要依据专家经验来手动设置阈值的麻烦,它是基于ResNet[14]的一种改进算法. 以上两种算法虽然都可以达到较高的故障检测率,但是网络结构比较复杂,训练及测试工作量较大,不具备良好的普适性. 基于此,本文从信号特征自动提取及计算复杂度方面综合考虑,设计一种融合注意力机制的通用电机故障检测模型,可以精确监测电机的运行状况,同时通过不同电机故障类型的测试结果证明其具有一定的普适性,整个系统设计流程如图 1所示.
全文HTML
-
电机故障类型主要有两类:一类是由绝缘层或绕组故障引起的电气类型故障,这类信号的频谱与电机信号的基频信息相差较远,可以进行信号的预处理或滤波进行消除;另一类是机械故障引起的电机故障,这类故障是最常见、同时也是最难检测的故障类型,这类故障信号的频谱通常处于电机基频信号附近,导致电机故障难以判断,但是,这类故障如果发现不及时或者处理不当,将会引起一系列其他的故障. 因此及时发现并进行维护修理,能极大地降低事故发生率.
当出现故障时,电机信号的频率会发生相应的变化,机械振动会导致气隙偏心,而气隙宽度变化会造成磁通量密度的变化,磁通密度的变化又会影响电机电感,从而产生各种谐波信号. 本文主要收集5类数据:外圈故障振动信号Fob、内圈故障振动信号Fib、保持架故障振动信号Ffd、滚球故障振动信号Fbd以及正常振动信号. 对于滚球直径为s,螺距直径为l的滚动轴承,根据文献[15],外圈缺陷频率Fob表达式为
式(1)中,n,Frs,φ分别表示滚球数量、转子转速以及滚球与螺距的接触角度. 内圈缺陷频率Fib表达式为
滚动轴承不规则导致的保持架缺陷频率Ffd为
滚球自转缺陷引起的滚球缺陷频率Ffd为
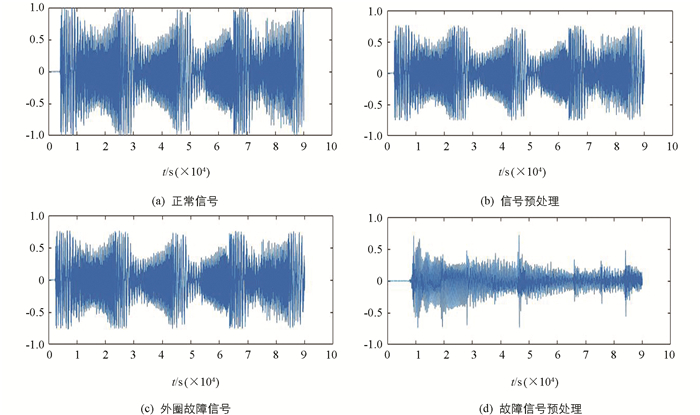
根据式(1)~(4)故障频率计算公式以及电机正常工作时的电机频率,共收集5类数据作为本文的样本训练数据集数据,用于学习训练及测试的数据集来自于生产车间用于加工的三相、1马力、200 V、4极的电机,轴端球轴承的其中一端为9个滚球的6205-2Z-J/C3,另一端为8个滚球的6203-2Z-J/C3. 电机转速为1 750 r/min,采样频率为12 kHz. 采集的数据集如表 1所示,每种状态包含300个样本,每个样本经过采样后得到1 000 s的信号数据点,将数据归一化为具有零均值和统一标准差的样本数据以消除直流偏移和幅度偏差的影响[16],如图 2所示为电机正常信号和外圈故障信号以及经过滤波预处理后的信号.
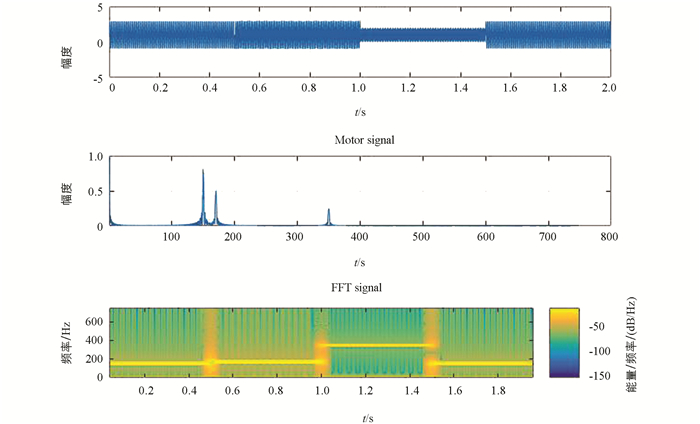
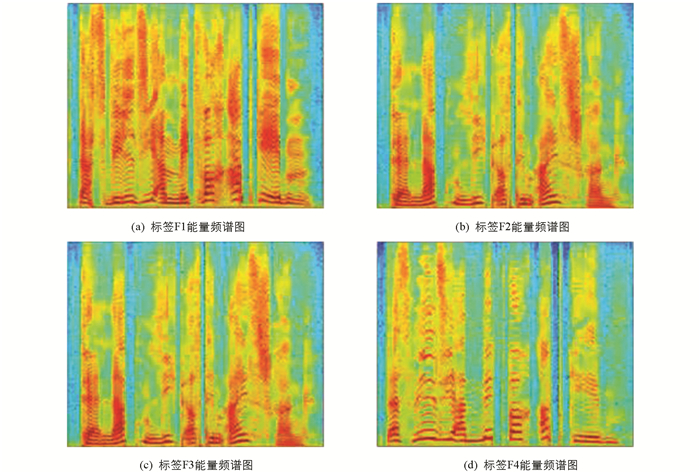
经过预处理后的电机信号是一维波形信号,对其截断分节并进行快速傅里叶变换(fast fourier transform,FFT)操作,转换成时频模式的光谱图,以每20 ms为一个单位帧,得到频谱图像序列,每一个样本信号被转换成分段的光谱图形能量信号输入到神经网络进行学习训练,如图 3所示. 不同于来自摄像头大小固定的图形图像,来自于电机信号的频谱帧的持续时间是变化的,会出现边缘数据少于固定宽度的情况,为了确保输入到神经网络的数据是固定的维数,需要对图像进一步处理,通常的处理方法是丢弃一些数据帧(源数据前端数据)或者用零进行填充(源数据结束部分),但是丢弃数据帧会降低训练时数据帧的精度,而加零填充则会导致最终网络的分类精度. 鉴于此,本文采用文献[17]提出的帧接纳算法,对于每个帧数据,计算其RMS能量并将其与预定阈值进行比较,低能量的窗口被认为是静音或者环境噪声,进行丢弃处理,而高能量的窗口则允许通过,在有效保留原始信号的同时也消除了静音及背景噪声等的影响,4种故障信号的能量频谱图如图 4所示. 同时由于某些故障信号是断断续续的,为了避免此类窗口数据的丢失,一旦允许一个窗口,就假定为一个信号事件的开始,接下来的帧窗口也被接纳.
-
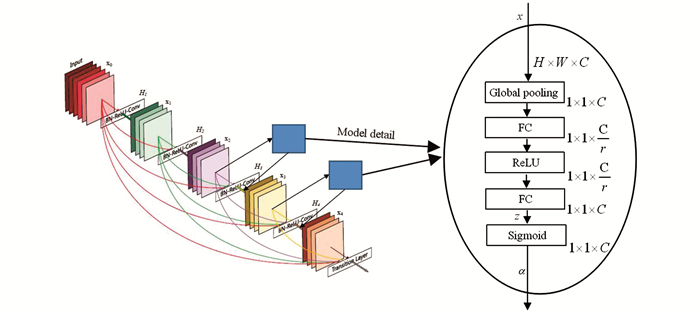
为了提升网络的检测分类性能,出现了很多新颖的检测算法以及改进方法,这些算法通常是通过增加网络的宽度或深度来提升网络检测的准确率,但是神经网络结构模型的深度或宽度在增加同时会引起网络模型参数的退化和过拟合等问题. 其中,ResNet[14]通过不断加深网络层数和使用恒等变换模块来提高网络检测的准确率,在一定程度上避免了梯度消失问题;Inception[18]则对网络结构的宽度进行扩展来提升检测效果,这种结构在网络性能提升的同时,也加大了网络的参数量,对于实时性要求较高的应用场合,其检测的延时性很大程度上阻碍了其发展;DenseNet[19]从数据特征的角度出发,通过特征重用和旁路设置并结合信息流,在大幅度减少了网络参数数量的同时,又一定程度上缓解了梯度消失问题,而且网络具有一定的正则效果,更易于训练. 为了提升电机故障特征信息的有效性,本文设计了如图 5所示的M-DenseNet网络结构模型,在保持原模型DenseNet中4层Dense Block的同时,对每个Dense Block n(n=1,2,3,4)进行改进处理,改进后的M-Dense Block n(n=1,2,3,4)模型结构可以对电机信号数据进行软阈值化处理,能自动滤除噪声信号的影响,同时根据数据集的信噪比设定不同的阈值,可以提升网络对有效信息的可重用性,具体改进措施如下:对每个Dense Block n(n=1,2,3,4)的后半部分的卷积模块增加fci(i=1,2,3,4)旁路模块,以M-Dense Block 2为例,前面6个卷积模块保持不变,后面的每一个卷积模块层增加一个卷积旁路模块fc2,其增加的模块如图 6所示.
对于上一层输出的特征图x,首先对其进行全局均值池化(global average pooling,GAP)处理,GAP是从特征图的每个通道计算平均值的操作,它可以减少在FC输出层中使用的权重数量,因此,深度神经网络过拟合的可能性较小,GAP还可以解决变速变量问题,从而使深度神经网络学习的特征不会受到故障脉冲位置变化的影响,其数学表达式为
式(5)表示第l层特征图经过全局均值池化后得到的结果,X1:h,1:ω,il表示均值池化核所对应的输出特征图范围分别为横向以及纵向从1~h行1~ω列的像素点. 经过GAP处理以后,得到1-D向量,然后前向传播进入全连接层(fully-connected,FC),经过ReLu函数处理后,继续进入下一个FC层,得到输出特征图z,特征图z通过Sigmoid函数输出α被放缩到(0,1),其公式为
将式(6)得出的缩放参数α与x的均值进行相乘,得到阈值信号η:
式(7)中,|xi,j,c|为x的均值,i,j,c分别表示特征图x的宽度、高度以及通道数量,其阈值η会在训练过程中得到一个合理的值,不会太大,也不至于为零,软阈值函数的设计如下:
不同于ReLu激活函数强制将负值信号置为零时会丢失部分信息,式(8)中的软阈值法将零附近的部分值置为零,这样部分负信号的值就得到了保留,在去噪的同时也最大程度地保留了原始特征信息,软阈值法的另外一个好处是对其信号进行导数运算,如式(9).
其导数值为1或0,这就避免了在深度训练时的梯度消失和梯度爆炸问题. 经过额外的旁路设计以后,则L层的输出XL表达式为
式中,HL表示对函数值的一个非线性变换. 对于这个M-Dense Block 2后续的其余5层,也进行相同的设计,可提高特征信息的可重用性,同时也进行了滤波处理. 对整个M-DenseNet结构模型,其他稠密模块M-Dense Block n(n=1,3,4)使用类似的方法,对其卷积层的后半部分添加类似的旁路模块,其每层的详细参数设计如表 2所示.
-
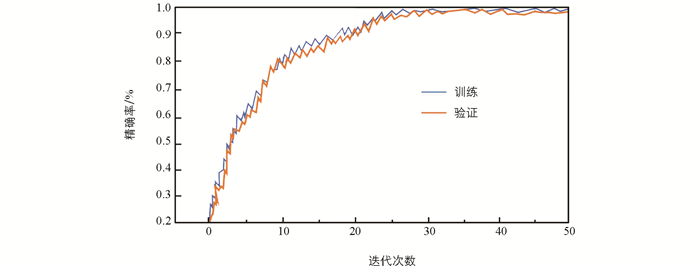
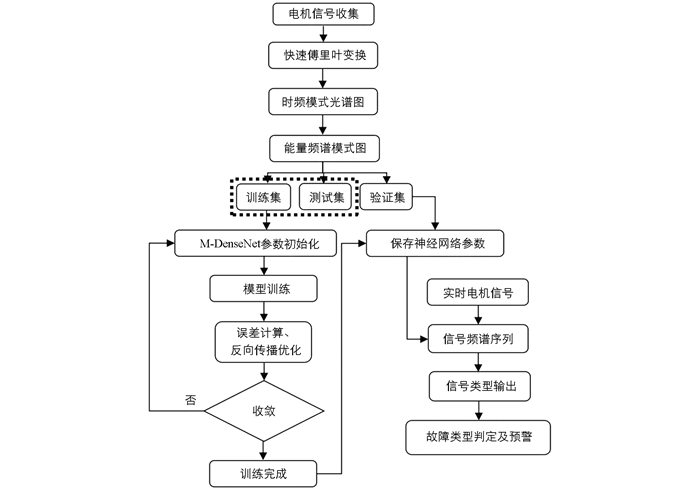
按照表 1进行采样并归一化处理后将每类300个样本数据随机地分为训练数据集以及测试数据集,分配的比例分别为80%与20%,同时随机选择30%作为验证数据集. 训练集用于本文M-DenseNet结构模型的训练,训练过程中根据验证集的误差曲线适当地调整模型的超参数. 验证集用于训练后的M-DenseNet进行准确性验证. 本文设计的网络模型的学习训练是基于Ubuntu18.04平台,编译环境为Python 3.6,CPU为i7-6700以及GPU为NVIDIA GeForce GTX 1070. 使用收集到的数据集进行学习训练,实现电机振动故障信号检测网络模型M-DenseNet的训练,应用Xavier初始器初始化所有卷积核的权重,设置网络偏置值参数为0.02,本文训练的迭代次数为50 k,使用随机梯度下降(stochastic gradient descent,SGD)对网络模型进行训练,动量为0.9,重量衰减为0.000 5,为了训练数据的有效性及降低数据的相关性,批量化(batch normalization,BN)数据集模块大小设为32,使用反向传播算法(back propagation,BP)对参数进行更新,训练学习采用与文献[18]相同的策略,在前10 k次迭代中,由于需要进行较多的特征学习,因此学习速率选择为较大的0.1,可以用较大的步长更新参数;接下来的20 k次迭代中,由于网络已经学习到了大部分的特征信息,还需要更多的细节特征信息,这时学习速率设置为0.01;在最后的20 k次迭代中,学习训练已经基本完成,为了学习更细致的特征信息,以较小的步长进行学习并更新参数,学习速率选择为0.001,同时设定BP训练的停止准则:当BP的迭代次数达到100或者最小分类误差为0.8%时,训练停止. 本文在数据信噪比为2时的训练及验证收敛曲线如图 7所示,从图可以看出,其验证时的精确率可以达到99.57%. 完整电机检测系统流程图如图 8所示.
-
本文设计的检测模型由于添加了部分旁路模块,对特征信息的提取更有效率,网络的计算量增加了,网络模型的训练时间也相应增加了,但是相比于DRSN-CS中同样采用注意力机制的算法,本文提出的算法的训练时间降低了40.76%,这对于实时性要求较高的工作电机具有非常明显的优势,能及时地进行故障检测及预警,各种网络的训练时间如表 3所示.
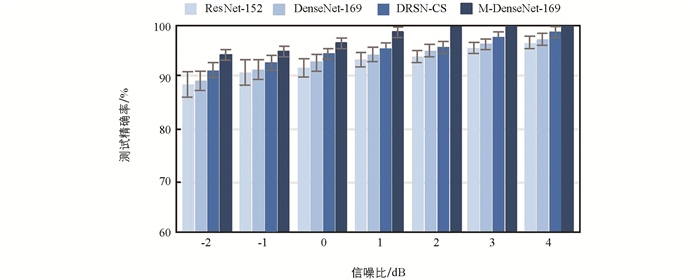
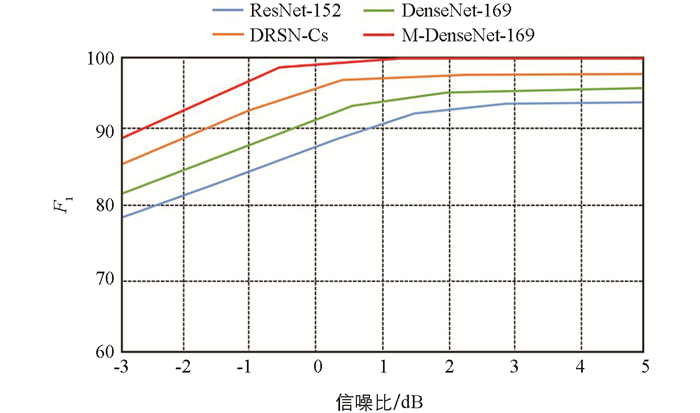
为了验证本文提出的检测网络的优越性,将其与另外3种网络结构ResNet-152和DenseNet-169以及DRSN-CS在不同信噪比情况下进行对比,为了评估算法的性能,使用统一的评估指标,精确率(accuracy)、召回率(recall)以及他们的调和平均(F1)对算法进行评估,分别以ηaccuracy,ηrecall,F1表示,其计算公式为
式(11)-(13)中,TP表示被判定为正样本的正样本数,FP为被判定为正样本的负样本数,FN表示被判定为负样本的正样本数,n和a分别为总样本数及分类错误的样本数. 在每一标签类型的60个测试数据中,其对正常工作电机信号的检测精确率及召回率均为100%,即电机正常工作情况下误报率为0;在对故障类型进行验证时,除了标签数据F1和F2有0.3%以下的误召回率以外,其他的检测精确率和召回率都很高,对故障类型的检测精确率可以达到98%以上,其对比结果如表 4所示.
同时,从图 9各种模型的训练/测试精确率以及图 10中的F1参数值在不同信噪比情况下的变化情况,结合网络理论对3种算法进行分析. 在相同信噪比情况下,本文较其他3种算法的检测精度更高,与ResNet-152相比,DenseNet-169由于每一层的输入都是前面所有层的输出,加强了特征信息的复用,网络训练的精度也更高,其测试误差也较小;DRSN-CS模型中每个恒等变换模块中加入的旁路模块从一开始就自动对信息进行分类处理,同时具有自动去噪的功能,对信号的分类精确率更高;本文设计的M-DenseNet-169的旁路模块在原有网络的基础上,进一步加强了特征复用,能提取到更多有用的特征信息,对故障信号进行分类的精度也更高,同时由于是从每一个模块的后半部分开始进行的特征信息提取,因此更具有表征性,训练时的分类损失误差能降到0.15%以下,分类精度可以达到99.85%,其验证精度也得到了提高,可以达到99.57%. 尤其是在低信噪比情况下,本文所设计的算法优势更明显,检测精确率可以达到92%以上,考虑到大部分电机是工作在比较复杂的噪声环境下,所以及时准确地进行故障预测将具有更大的价值.
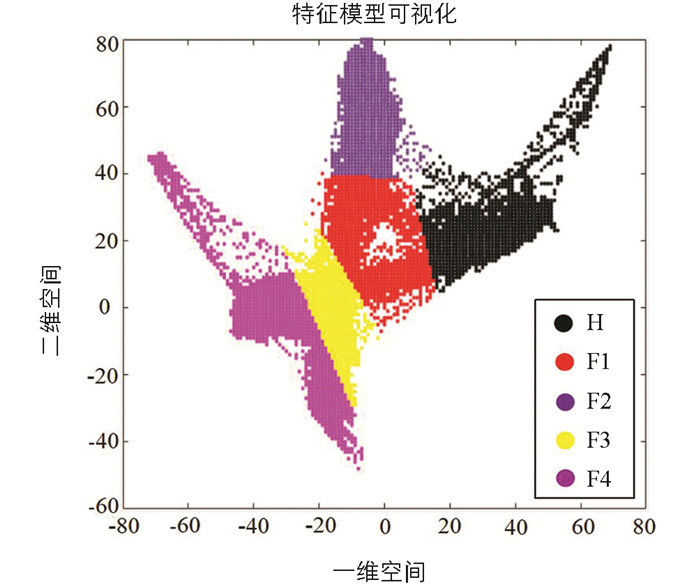
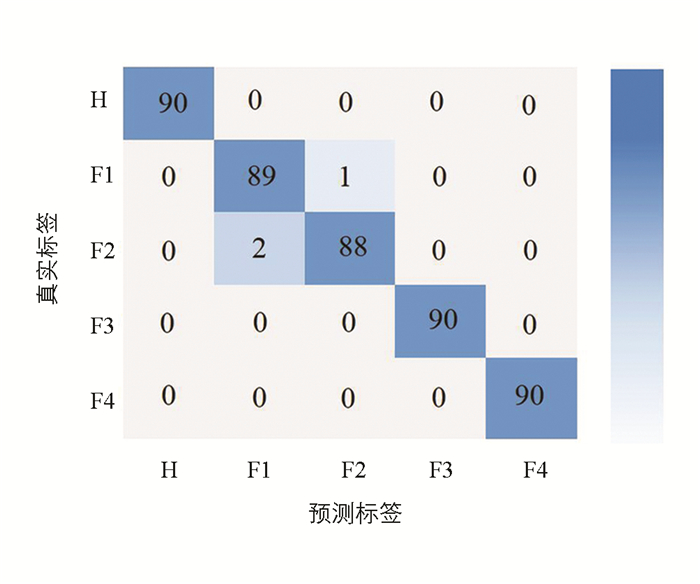
为了直观观测其分类结果,将本文算法的分类视觉特征图在二维环境下进行分析,如图 11所示. 本文设计的网络由于加入的旁路模块使各种信号之间的特征区分更为明显,算法具有明确的分类界限,分类效果显著,并且相互之间不存在特征表征信息的交叉,即使是信号的基频较为相近,其仍然具有比较好的分类效果. 同时,通过对信号分类的混淆矩阵进行分析,如图 12所示. 其中主对角线上的数字代表了本文算法对每一类故障状态正确诊断的样本个数,除了在内圈故障及外圈故障的判别上存在很低的误差以外,网络对其他类型如正常工作、保持架故障、滚球故障的分类都有很高的精确率,网络整体的分类精度完全可以起到误差检测及分类的作用.
进一步分析对比后两种算法,DRSN-CS结合了信号处理中自动降噪的经典内容、信号深度特征学习以及注意力机制,避免了人工设置阈值的麻烦,其是基于ResNet的变形结构. 对DRSN算法采用ResNet-152作为基础结构与本文采用DenseNet-169作为基础结构进行进一步的对比,在具有相近层数的原始网络的结构参数数量对比中,由于ResNet-152全部使用3×3的卷积核进行特征信息提取,而DenseNet-169则使用1×1与3×3交替的卷积核,1×1的卷积核与3×3卷积核相比,具有更少的参数和具有更强的特征泛化能力. 同时,ResNet-152中有50个恒等变换模块,DRSN算法需要50个旁路模块进行自动降噪处理,M-DenseNet-169模型中,由于只在Dense Block n(n=1,2,3,4)的后半部分加入旁路模块,总计只有41个模块,参数量得到了大大的降低,实时检测速度也加快了很多. 同时,由于是在每个模块的后半部分进行的降噪处理,后续的特征信息更能表征信号特性,在进行降噪处理时所得到的参数也更为合理.
-
电机发生故障时,信号频率会发生相应的变化,但是当其中含有噪声信号时,不易判断故障信号的类型. 本文设计的改进型卷积神经网络M-DenseNet在原DenseNet的基础上,对每个Dense Block n(n=1,2,3,4)的后半部分每一层添加一个旁路模块,能自动对信号进行降噪处理,免除了人工提取特征的不确定性. 通过对几种网络的测试结果表明,本文设计的M-DenseNet模型在训练学习过程中,除了能学习到更多的特征信息以外,其信号分类的精确性也得到了进一步的提高,尤其是在信噪比较低的情况下,本文所提出算法的检测精确率更高,普适性更好. 但是需要注意的是本文只收集了5类数据,其中只有4类故障数据,但是电机的故障类型有很多,作者将在后续的学习中收集更多的数据集进行训练学习,以提高电机故障检测的普适性,同时在检测速率方面也需要进一步研究.