


 下载:
下载:
-
开放科学(资源服务)标识码(OSID):

-
低碳环保、绿色节能是当今时代的主旋律,交通领域电气化已成为应对气候变化和能源危机的关键路径[1-3]。电动汽车是其中的关键一环,其可持续发展在推动交通体系净零排放,实现“双碳”目标中发挥着战略支撑作用[4]。作为电动汽车的核心部件,动力电池及其管理技术的发展水平成为影响电动汽车推广的关键因素。特别是荷电状态SOC(State of Charge),它被定义为当前剩余容量与最大容量之比[5],直接关系到动力电池系统的运行安全、能量利用效率及整车续航优化等关键技术指标。然而SOC无法像电压、电流及表面温度等参数一样直接测量,其精确估计面临电池非线性时变特性、工况扰动及电池老化等多重挑战[6-7]。因此,准确、高效的SOC估计对保障电动汽车安全行驶、提升电池系统性能至关重要。
时至今日,科研人员对SOC的估计方法进行了广泛的研究,现有方法主要分为安时积分法、模型法和数据驱动法3类。安时积分法直接通过对电流积分计算电池当前SOC,简单直接,但作为一种开环方法易受电流扰动影响,误差会随时间逐渐累积,文献[8]的系统分析显示,在电流漂移5 mA的情况下,估计误差可达5%,且初始SOC的不确定性需依赖其他算法进行补偿。模型法主要包括电化学模型和等效电路模型:电化学模型虽具有严格的物理可解释性,通常基于多孔电极理论[9-10],由若干偏微分方程构建电池的机理模型,但涉及参数众多难以实时计算;相较之下,等效电路模型(Equivalent Circuit Model,ECM)通过常见电气元件模拟电池动态特性更具工程实用性[11-12],通常搭配滤波方法一起使用形成闭环估计,如文献[13]基于二阶等效电路模型提出了一种基于EKF-AUKF算法的在线SOC估计方法,并对估计结果进行了补偿,提高了在大电压误差下的SOC估计精度。
数据驱动法是近年来的研究热点和前沿,其通过大量数据训练端到端的“特征—状态”映射模型来规避复杂机理建模,主要有支持向量机(Support Vector Machine,SVM)、随机森林(Random Forest,RF)等传统机器学习方法和递归神经网络(Recurrent Neural Network,RNN)、卷积神经网络(Convolutional Neural Network,CNN)等深度学习方法,如文献[14]提出了一种梯度提升支持向量回归(GB-SVR)集成方法,以离散步骤执行正则化学习,提高了该方法的计算效率和估计准确性;文献[15]提出了一种结合注意力机制的时序卷积神经网络模型(TCN-attention),并使用粒子群算法(Particle Swarm Optimization,PSO)优化模型参数,在宽温域动态测试下验证模型最佳均方根误差小于1%。
随着智能电池与多维传感技术的发展,力信号的加入为电池管理提供了新的维度[16-17]。电池在充放电循环过程中,锂离子在正负极活性材料间的脱嵌[18-19]使得电池发生体积形变,在电池壳体或模组外壳的固定约束下转化为对电池压力,这种现象被称为“呼吸效应”[20]。研究表明,压力对电池内部的固液相界面、电极材料的孔隙、粒径大小、接触状态等均有较大影响[21-23],但同时也蕴含着丰富的实时状态信息。目前使用力信号做电池SOC的相关研究较少,文献[24]在电信号的基础上增加了力信号,采用长短期记忆神经网络(LSTM)对电池SOC进行了估计,在不同动态工况下验证结果的均方根误差小于0.45%。文献[25]也做了相似的研究,但均未对力信号对模型的影响做具体分析。
综上所述,现有的研究在力信号对深度学习模型的作用机制方面缺乏系统性的解析,特别是其对不同网络架构的影响差异尚未明确;同时,对于耦合力信号后多特征间的协同关系的可解释性研究存在空白。针对上述问题,本研究构建了不同老化状态、不同温度、不同动态工况共90种循环条件下的放电数据集,采用特征消融法探究力信号对LSTM与TCN模型的训练过程、估计精度及鲁棒性影响,并创新性地引入SHAP(SHapley Additive exPlanations)解析了不同特征的贡献度。
全文HTML
-
本研究以标称容量1.2 Ah的NCM523三元锂离子软包电池为实验对象,选取3种不同老化状态的样本:初始未循环电池(容量保持率为100%)、循环400次(容量保持率96.72%)及800次(容量保持率92.78%)的老化电池。循环老化实验分为以下5个步骤:
1) 静置30 min;
2) 采用恒流恒压(Constant Current and Constant Voltage,CC-CV)充电方式,先1 C恒流充电至4.2 V,再恒压充电至电流降为0.02 C;
3) 静置30 min;
4) 恒流放电至电压降为3 V;
5) 重复步骤1)-4)。
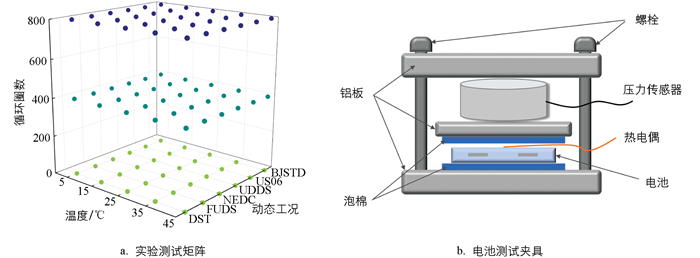
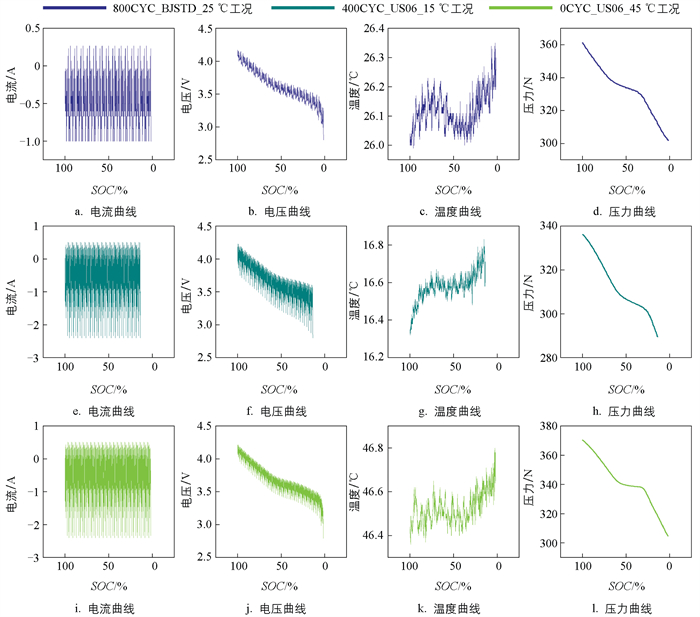
实验测试矩阵如图 1a所示,涵盖5个温度梯度(5 ℃、15 ℃、25 ℃、35 ℃、45 ℃)与6种标准动态放电工况——动态应力测试(DST)、北京动态应力测试(BJDST)、新欧洲驾驶循环(NEDC)、联邦城市驾驶工况(FUDS)、高速公路工况(US06)及城市道路循环(UDDS),构建宽温域多工况的锂离子电池放电数据集。图 2展示了部分工况下,3种老化状态的电池放电时所采集的多维信号数据。
为了采集电池的温度和压力信号,所有实验均在如图 1b所示的恒位移夹具中完成。压力传感器和电池分别安装在3块铝板间的上下两层,同时在电池上下表面覆盖泡棉,用4枚M4螺栓紧固并施加初始0.1 MPa的预紧力,最后通过在电池表面粘贴热电偶采集温度。实验采用热电偶直径仅为0.127 mm,而泡棉厚度为3 mm,因此泡棉的弹性形变可有效补偿热电偶引起的局部凸起,维持整体压力的均匀性,消除电池表面粘贴热电偶对压力采集精度的影响。电池充放电采用新威5 V 6 A充放电测试仪,装好夹具的电池置于Binder KB115恒温箱中以控制环境温度。
电池的放电测试过程分为以下6个步骤:
1) 将电池置于目标温度的温箱中静置2 h以达到热平衡;
2) 执行恒流恒压(CC-CV)充电方式(先0.2 C恒流充电至4.2 V,再恒压充电至电流降为0.02 C);
3) 充电完成后静置2 h以消除极化效应;
4) 按预设动态工况执行放电至2.8 V;
5) 放电后再静置2 h;
6) 在当前温度下依次完成6种动态工况测试后,调整温箱设定至下一温度节点重复1)-5)。
最终得到包含电压、电流、温度、压力4种信号的90条多维参量放电曲线,完整覆盖不同老化程度、温度条件与动态工况的耦合作用场景。
-
为了研究力信号在不同深度学习模型结构上的作用效果,选取了LSTM和TCN两种模型作对比实验,其中LSTM是递归结构,通过隐藏状态传递时序信息,依赖链式结构逐步处理序列,而TCN则是卷积结构,通过膨胀卷积扩大感受野,以并行化方式捕获序列长期依赖。二者均适用于解决时序数据建模问题,是时序领域的主流模型,因此在电池状态估计中被广泛研究与应用。
-
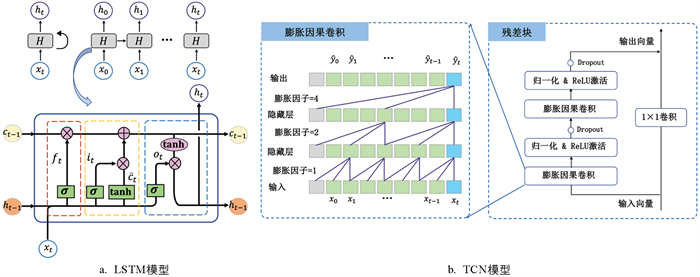
LSTM作为循环神经网络(Recurrent Neural Network,RNN)的改进架构,通过引入记忆单元和门控机制有效缓解了传统RNN的梯度消失与长期依赖问题。模型结构如图 3a所示,其核心特征在于通过记忆状态与隐藏状态的纵向传递实现跨时间步的信息继承。每个LSTM单元通过输入门、遗忘门和输出门3个门控结构控制信息的流动与更新,输入门控制决定将当前输入信息写入记忆状态的程度,遗忘门决定是否“遗忘”记忆状态中已存储的历史信息,允许模型有选择性地“清除”无关信息,输出门决定记忆状态中的信息在当前时间步的输出。网络以时序递推方式运作,每个时间步的输出基于前一时刻的记忆状态、隐藏状态及当前输入计算生成。模型的数学表达式如公式(1)-(6)所示:
其中:ft、it、ot分别是遗忘门、输入门、输出门;xt是当前时间步t的输入;ht是隐藏状态;ct是记忆状态;
$\tilde{c}_t$ 是更新过程中的单元候选状态;Wf、Wi、Wo、Wc为权重系数矩阵;bf、bi、bo、bc是相应的偏差;σ和tanh分别表示sigmoid激活函数和双曲切线激活函数;⊙表示逐元素乘法。 -
相较于LSTM的时序递推计算方式,时间卷积网络(TCN)凭借卷积运算的并行化处理特性能够显著提升计算效率[26]。针对传统一维卷积在时序建模中存在的感受野受限问题,TCN通过膨胀因果卷积架构实现改进,因果卷积(Causal Convolution)强制输出序列在时间步t的预测值仅依赖于输入序列中t时刻及之前的历史数据,严格遵循时间因果性约束,避免了未来信息的泄露;而膨胀卷积(Dilated Convolution)则通过引入膨胀因子d,使卷积核在保持参数量不变的前提下按2l指数规律扩展感受野(l为网络层数),从而有效捕获长程时序依赖,膨胀因果卷积如公式(7)所示:
式中:F(t)为在时间步t的卷积输出结果;x为输入序列;f为卷积核;k为卷积核大小;i为卷积核内局部索引;d为膨胀因子。
TCN主体结构由多个如图 3b所示的残差块堆叠而成,包括两层膨胀因果卷积层。原始的输入矩阵与卷积后的输出矩阵会通过残差连接的方式直接相加,从而得到该残差块输出,该方式可缓解深层神经网络的梯度消失与爆炸问题,使得训练过程更加稳定。
-
机器学习模型通常被视作黑箱模型,模型的可解释性研究也始终是机器学习领域的关键研究方向。SHAP作为一种事后可解释性框架[27-28],通过量化特征贡献度来解析模型预测逻辑,目前已在能源[29]、卫生[30]、环境[31]等多个领域的机器学习模型中应用。其核心思想源自合作博弈论中的Shapley值。具体而言,该方法使用Shapley值量化单一特征对模型预测结果的边际贡献,而模型预测值可分解为所有特征的线性加和,如公式(8)、(9)所示:
其中:φ0表示基线输出(特征期望值下的模型预测);φi为第i个特征的Shapley值;M为特征总数;N为全体特征集合;S表示不含第i个特征的特征子集;|S|为子集容量;fx为预测函数。
-
针对所构建的数据集,采用分层随机抽样策略进行数据划分,以老化程度、环境温度及动态工况作为分层变量,将数据集按70%、15%、15%的比例划分为训练集、验证集与测试集,确保各子集中所有测试条件分布的均匀性。为消除不同特征间多物理量纲差异对模型训练的干扰,采用Z-score标准化方法对各特征进行归一化处理:
式中:z为归一化后的特征值;x为原始特征值;μ、σ分别为训练集特征x的均值与标准差。
根据SOC的定义,可以用放电电流来计算电池的SOC真实值:
式中:SOCt和It分别表示时间步t的SOC真实值和电流;Δt=1 s为采样频率;Cm为电池当前最大容量。
考虑到时序模型的输入特性,采用滑动窗口法,设置窗口长度L=64(对应64 s)、步长s=1,将每条连续放电曲线划分为重叠的子序列。每个输入样本
$x \in \mathbb{R}^{L \times M}$ ,M为特征数量,对应输出标签y为该窗口末端时间步的SOC真实值。单条放电曲线可生成T-L+1个训练样本(T为原始序列长度)。 -
采用平均绝对误差MAE(Mean Absolute Error)、均方根误差RMSE(Root Mean Square Error)和最大绝对误差MaxAE(Max Absolute Error)作为模型估计效果的评价指标。MAE对异常值的低敏感性使其适用于评估模型平均性能,RMSE侧重表征模型输出的稳定性,MaxAE可用于评估模型安全边界。3种评价指标的公式如(12)-(14)所示:
其中:yi为SOC真实值;
$\hat{y}_i$ 为模型估计值;N为测试样本总数。
2.1. LSTM模型
2.2. TCN模型
2.3. SHAP理论
2.4. 数据预处理
2.5. 模型评价指标
-
汽车在行驶中工况复杂多变,所以测试集涵盖了多种不同工况,以便系统验证力信号的性能增益效果。如表 1所示,加入力信号后两种模型在测试集各工况下展现出显著的性能提升。对于LSTM模型,引入力信号后,测试集整体MAE从0.316%下降至0.312%,下降幅度较小,但RMSE从0.576%下降至0.487%,MaxAE从14.051%降至4.770%,降幅分别为15.45%和66.05%,极大拓宽了SOC估计的安全边界。TCN模型的性能提升更为显著,引入力信号后测试集整体MAE从0.708%降至0.384%,RMSE从1.076%降至0.550%,降幅分别达45.76%和48.88%,MaxAE也从12.723%下降至5.758%,降幅54.74%,且所有测试工况RMSE均控制在1%以内。由此可见,力信号的加入为模型观测电池内部状态提供了新的维度,提高了SOC的估计精度,同时有效地补偿了不同模型架构在时序特征提取方面的固有偏差,缩小了LSTM和TCN两种模型间的性能差异。
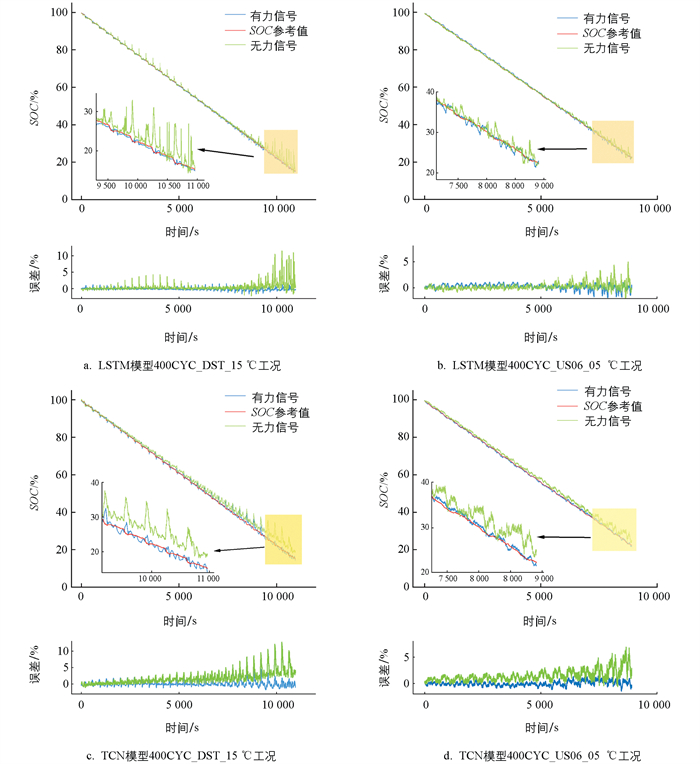
表 2展示了测试集中力信号对SOC估计性能影响最显著的两组工况(400CYC_DST_15 ℃与400CYC_US06_05 ℃),图 4则为其估计效果及误差曲线。结果表明,两种模型误差都集中在低SOC区间,这与训练集数据分布特性直接相关,具体而言,数据集温度涵盖5至45 ℃,低温环境下电池放电能力的限制导致低SOC区间的样本相对稀缺,数据稀疏性削弱了模型对低SOC部分的特征的捕捉能力。进一步观察发现,未加入力信号时,SOC估计曲线整体向上偏移,表明估计值普遍高于实际值;而加入力信号后,估计误差围绕零波动,表明力信号对提高估计精度及稳定性起到了显著作用。特别地,如图 4c、4d所示,TCN模型在未加入力信号时,SOC估计曲线逐渐偏离真实值且误差不断增大;而在加入力信号后,估计值始终保持在真实值附近,成功修正了累积偏差,进一步验证了力信号在减小估计误差、优化SOC估计模型的精度和鲁棒性方面发挥了关键作用。
-
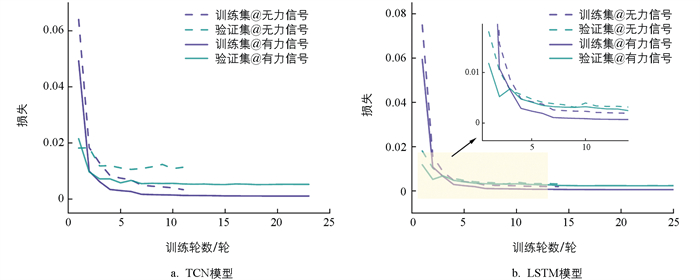
模型的估计结果直观验证了力学信号对状态估计精度的提升,而训练过程中损失函数的演化规律进一步揭示了其内在作用机制。为了防止模型过拟合,训练采用了早停技术,即当模型的验证损失在连续一定轮数不下降后终止训练,所以模型训练的轮数略有区别。图 5展示了训练过程中的训练损失与验证损失。加入力信号后,LSTM和TCN两类模型训练过程均呈现系统性下降且收敛速度有所提升,其中TCN模型训练损失在第4轮即下降至未加力信号模型的第11轮,这表明力信号的引入增强了输入特征间的信息互补,使模型在训练初期能够快速捕捉电—热—力多维特征与SOC间的非线性映射关系。加入力信号后两种模型的验证损失均持续下降了25轮左右才触发早停机制,而未加力信号模型在13轮附近就触发了早停机制,陷入了局部最优,推测力信号的引入扩大了模型的优化搜索空间,使模型需要更多训练轮次才能逼近全局最优解,有效延缓了模型的收敛停滞。
-
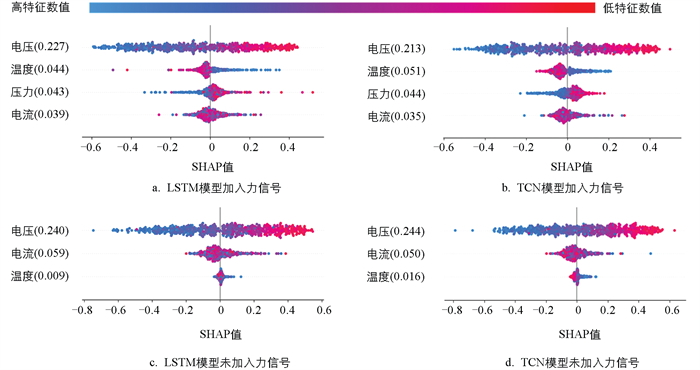
图 6展示了两种模型各个特征SHAP值的总结图,图中的每个点代表一个特征点,颜色从红到蓝表示特征数值的从高到低变化,X轴表示每个特征点的SHAP值,特征则按照SHAP值的平均绝对值从上到下排列,括号中是SHAP值的平均绝对值大小。需要注意的是,SHAP值的符号仅代表特征对预测值的正向或负向作用,其绝对值反映贡献强度,因此,特征点在X轴上的分布越广,表明该特征对SOC估计结果的影响越大。无论是否加入力信号,两种模型中电压特征始终占据最高贡献度,这与三元锂离子电池电压和SOC的准线性关系高度吻合。如图 6c、6d所示,未加力信号时温度特征的SHAP值都集中于0附近,意味着其对SOC估计的贡献极为有限。而加入力信号后,如图 6a、6b所示,除电压外的3个特征贡献度相似,虽低于电压特征但都对SOC产生了一定的影响,表明力信号的加入增强了特征间的协同效应,从特征重要性的角度解释了加入力信号后SOC估计精度提高的原因。
-
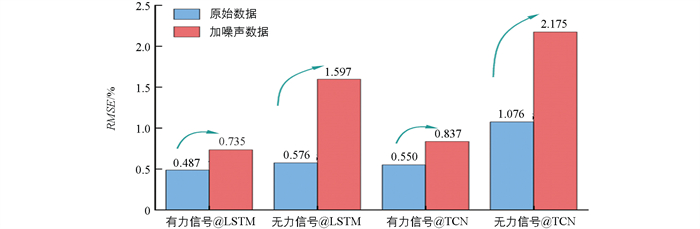
深度学习模型直接建立了特征输入与目标输出间的映射关系,因此研究模型对输入数据噪声的鲁棒性具有重要意义。通过向测试集中注入标准差为原始数据10%的高斯白噪声,评估力信号对深度学习模型噪声鲁棒性的作用。结果如图 7所示。未加入力信号时,LSTM模型的RMSE从0.576%上升到了1.597%,TCN模型也从1.076%上升到了2.175%,上升幅度分别为177.43%和102.16%。这一差异可归因于模型架构的特性,LSTM的时序递推计算特性导致噪声误差沿时间维度累积,而TCN的卷积架构对局部特征的提取能力使其具备更强的鲁棒性。加入力信号后,LSTM和TCN模型RMSE则分别上升了50.81%和51.99%,两种模型RMSE的上升幅度相似且均大幅度减小,表明了力信号对复杂工况下噪声干扰的抑制作用,同时也补偿了不同模型架构对噪声敏感性的差异,增强了模型鲁棒性。
3.1. 估计结果分析
3.2. 模型训练分析
3.3. SHAP贡献度分析
3.4. 鲁棒性分析
-
力学信号在锂离子电池的机理研究与智能管控中正发挥越来越重要的作用,本研究从多个方面系统分析验证了力学信号对电池SOC估计深度学习模型的性能增益作用。首先,为了适应电动汽车在行驶时的复杂工况,本研究设计了涵盖3种老化程度、5种不同温度、6种动态工况下的放电实验,构建了宽温域、多工况的锂离子电池放电数据集。在估计精度方面,选择LSTM和TCN两种深度学习模型,系统评估力信号对不同架构的影响。结果表明,引入力信号后,LSTM和TCN模型的RMSE分别下降15.45%和48.88%,MaxAE分别下降66.05%和54.74%,体现了力信号的加入对模型估计精度有提升作用;同时,训练过程中损失的系统性下降与收敛速度提升表明了力信号有效延缓了模型的收敛停滞,改善了学习过程的稳定性。其次,本研究采用了SHAP理论对特征重要性进行了分析,揭示了力信号的引入增强了特征间的协同效应。最后,在鲁棒性测试中,引入力信号后,LSTM与TCN模型在注入噪声前后的RMSE增幅分别由原先的177.43%和102.16%显著下降至50.81%和51.99%,体现了力信号对模型抗干扰能力的提升。综上所述,力信号在提升SOC估计精度方面有显著作用,也从侧面印证了其在电池健康状态评估、热失控预警等更多电池管理功能中的应用潜力,这对构建融合机械特性的新一代电池智能管理系统具有重要价值。