


 下载:
下载:
-
捕食者-食饵系统是普遍存在于自然界的一类基本生态学系统.自Lotka和Volterra开启对捕食者-食饵系统的理论研究以来,研究者们建立了大量的动力学模型探讨捕食者-食饵系统中的非线性行为,极大地促进了种群动力学的发展[1].捕食者-食饵动力学模型按时间连续性可以分为:连续时间模型和离散时间模型等[2].通过文献比较发现,相对于连续时间模型来讲,离散时间模型更能够有效地揭示出捕食者-食饵系统中复杂的非线性动力学特征[3].大量研究表明,时间离散捕食者-食饵系统能够产生倍周期分岔、Neimark-Sacker分岔,且由分岔可以引起周期轨、不变环、混沌吸引子和周期窗口等非线性行为[4-6].本文研究了一类具有比率依赖型功能反应函数以及捕食者具有可替换食物源的时间离散捕食者-食饵系统,分析了系统的稳定不动点条件和Neimark-Sacker分岔,并通过数值模拟发现了由Neimark-Sacker分岔所引发的混沌路径上的各类吸引子和倍周期过程.
全文HTML
-
本文考虑的捕食者-食饵系统具有两个特征:功能反应函数为比率依赖型;捕食者具有可替换的食物源.此系统的时间连续模型表达式如下[7]:
其中:u(t)和v(t)分别表示食饵和捕食者在时间t的密度;
$\alpha = \frac{{puv}}{{mu + nv}}$ 表示具有比率依赖型的功能反应函数;$bv\left( {1 - \frac{v}{{{k_2}}}} \right)$ 表示捕食者具有可替换的食物源;a和k1表示食饵内禀增长率和环境容纳量;b和k2表示在食饵u不存在时捕食者的内禀增长率和环境容纳量;p和e表示捕食率和转化系数;m和n表示半饱和常数;d表示捕食者的死亡率;a,k1,b,k2,p,e,m,n,d都是正常数.令
则系统(1) 可简化为如下无量纲形式:
对系统(2) 应用Euler公式,则可以得到如下时间离散捕食者-食饵系统的映射表达式:
其中τ>0是时间步长.利用映射不动点的定义[8],可求得时间离散捕食者-食饵系统的4个非负不动点如下:
其中u*是以下二次方程的正实根
且
可以确定映射(3) 的正不动点(u3>0,v3>0) 存在的充分条件.若映射(3) 中的参数满足如下不等式
则此映射有一个正的实不动点(u3,v3).
定理1 1) 不动点(u0,v0)在任意参数条件下都不稳定;
2) 当β+α-δ<0且0<τ<min
$\left( {2,{\rm{ }} - \frac{2}{{\beta + \gamma - \delta }}} \right)$ 时,不动点(u1,v1)稳定;3) 当α-ε<0,δ-β<0且0<τ<min
$\left( { - \frac{{2\alpha }}{{\alpha - \varepsilon }}, - \frac{2}{{\delta - \beta }}} \right)$ 时,不动点(u2,v2)稳定;4) 当q<1且-(1+q)<p<1+q时,不动点(u3,v3)稳定,其中
证 不动点的稳定性可以采用判断差分系统稳定性的Jury判据来分析.映射(3) 在任一点(u,v)的雅克比矩阵表达式为
矩阵(9) 在(u0,v0)处的特征方程为λ2-(2-τ(1+β-δ))+|J(u0,v0)|=0,特征值为λ1=1+τ,λ2=1+(β-δ)τ,其中λ1>1,故可知不动点(u0,v0)不稳定,此结果对任意参数条件都成立.
对于不动点(u1,v1),雅克比矩阵为
其两个特征值为λ1=1-τ,λ2=1+τ(β+α-δ),当β+α-δ<0,0<τ<min
$\left( {2,{\rm{ }} - \frac{2}{{\beta + \gamma - \delta }}} \right)$ 时,|λ1|<1,|λ2|<1,不动点(u1,v1)稳定.不动点(u2,v2)对应的雅克比矩阵为其两个特征值为
${\lambda _1} = 1 + \tau - \frac{{\tau \varepsilon }}{\alpha }$ ,λ2=1+τ(δ-β),当α-ε<0,δ-β<0,0<τ<min$\left( { - \frac{{2\alpha }}{{\alpha - \varepsilon }}, - \frac{2}{{\delta - \beta }}} \right)$ 时,|λ1|<1,|λ2|<1,不动点(u2,v2)是稳定的.同理,不动点(u3,v3)对应的雅克比矩阵的两个特征值为
其中p和q的表达式见公式(7),(8).当q<1,-1+q<p<1+q时,|λ1<|1,|λ2|<1,不动点(u3,v3)是稳定的.
-
时空离散捕食系统的Neimark-Sacker分岔及其产生条件可以通过Neimark-Sacker分岔理论[9]来分析.离散系统在(u3,v3)处产生Neimark-Sacker分岔的第一个条件要求公式(12) 中λ1和λ2是一对模为1的共轭复数.复数特征值要求p2-4q<0,即
另外,当q=1满足时,也就是
其中
两个复数特征值满足|λ1|=|λ2|=1.
通过下式将(u3,v3)平移至原点
则映射(3) 可转化为
式中O((|x|+|y|)4)表示以(x,y)为变量且阶数至少为4的多项式函数;映射中的系数表达式如下:
在满足条件(13) 和(14) 的前提下,映射(16) 的不动点(0,0) 对应雅克比行列式的特征值也是模为1的共轭复数.将两个特征值写成
式中
${\rm{i = }}\sqrt { - 1} $ 并且Neimark-Sacker分岔的第二个条件要求满足
以及
公式(21) 等价于p(τ0)≠-2,0,1,2.应该注意到在公式(17) 中p2(τ0)≠4.因此,p(τ0)≠-2,2,于是公式(21) 变成p(τ0)≠0,1,即
接下来研究映射(16) 的规范型,应用变换如下:
那么映射(16) 变成
式中
为使映射(24) 在不动点(0,0) 附近产生Neimark-Sacker分岔,下面的a必须不为零[10]:
其中
并且
$F\left( {\tilde x,\tilde y} \right)$ 和$G\left( {\tilde x,\tilde y} \right)$ 在(0,0) 处的二阶和三阶偏导数为经计算得
其中:
定理2 当条件(13),(14),(20),(22) 和(28) 成立时,时空离散捕食者-食饵系统在(u3,v3)附近发生Neimark-Sacker分岔.如果a<0以及d>0,则Neimark-Sacker分岔是超临界的,(u3,v3)失去其稳定性并在离散系统中产生吸引不变环.
-
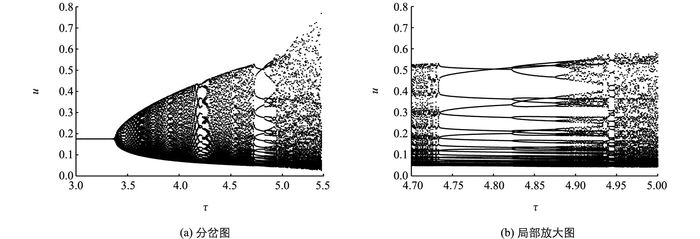
根据以上理论结果,本节通过数值模拟展现参数变化时离散捕食系统的Neimark-Sacker分岔以及由分岔所引起的复杂动力学行为.根据文献[7],在数值模拟中α=0.91,β=0.03,γ=0.15,δ=0.05,ε=1.0为固定参数,τ为变化参数. 图 1(a)展示了映射(3) 随着参数τ变化的分岔图,分岔图模拟的初始值为(1.01u*,1.01v*).在给定参数条件下,可以确定Neimark-Sacker分岔的临界τ值为τ=3.374 4. 图 1(b)是对图 1(a)的局部放大,展示了离散系统趋于混沌过程中产生的倍周期分岔过程.
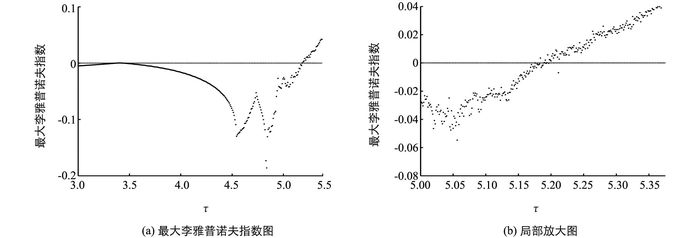
图 2(a)展示了对应于图 1(a)的最大李雅普诺夫指数图.从图 2(a)可以看出,随着参数τ的增大,映射(3) 最终会展现出混沌行为. 图 2(b)为图 2(a)的局部放大图,展示了最大李雅普诺夫指数大于0的点.从图 2(b)可以看出,离散捕食者-食饵系统的混沌行为大约起始于τ=5.19附近.
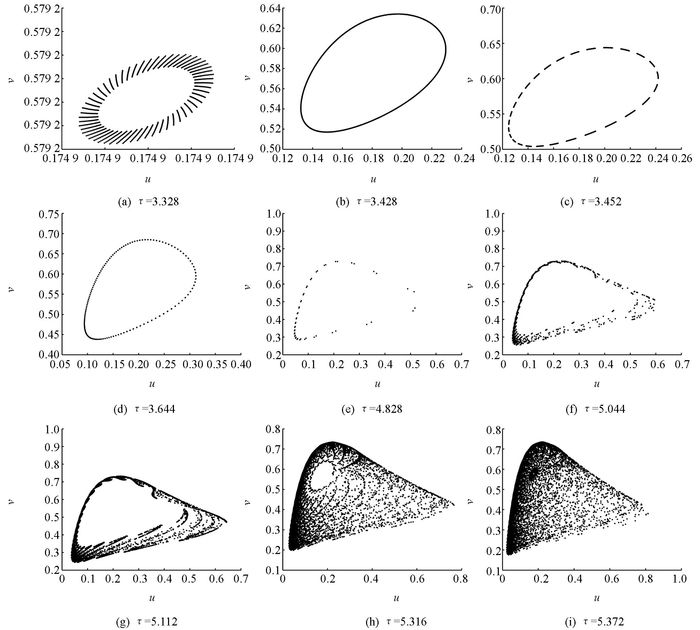
图 1和图 2揭示了Neimark-Sacker分岔开启了一条通往混沌的路径.在此混沌路径上,离散系统的吸引子随着参数而发生改变.映射(3) 展示了随着τ值的增加,系统的吸引子从不动点(图 3(a))到混沌(图 3(b))的转变过程,中间经历了不变环(图 3(b)-(d),(f)-(g)),以及在不变环区的周期窗口(图 3(e)).
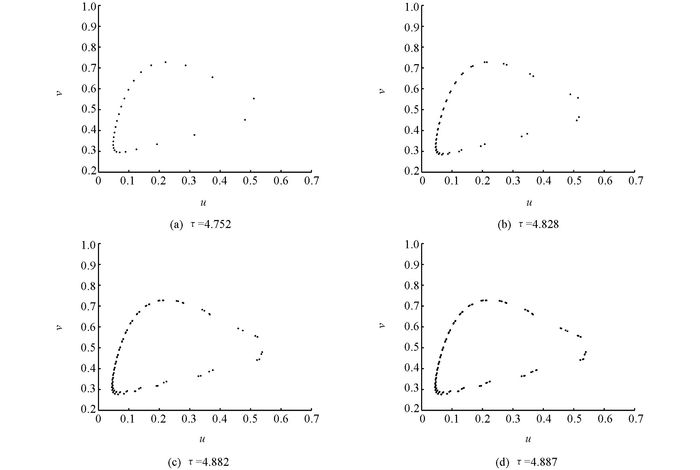
由Neimark-Sacker分岔所引起的混沌路径上也会产生倍周期分岔. 图 4揭示了离散捕食者-食饵系统的一个倍周期分岔过程.如图 4所示,系统从周期-34轨道(图 4(a))出发,经历倍周期分岔转变为周期-68轨道(图 4(b)),再到周期-128轨道和周期-256轨道(图 4(c)和图 4(d)).在经历此倍周期过程之后,系统行为重新进入不变环区.