




HTML
-
近年来,各种传染病严重威胁着人类的健康,数学模型被认为是研究各种传染病动态的有力工具[1-3].一些传染病暂时或永久免疫,用SIR,SIRS模型来描述;其他一些传染病,康复后的个体可能恢复成感染者,用SIRI模型来描述,如肺结核、疱疹[4-5].最近,各种各样的数学模型都开始考虑媒体报道的影响.文献[5]提出下列带有媒体报道的随机SIRI模型:
其中:S(t)表示t时刻易感者的数量,I(t)表示t时刻感染者的数量,R(t)表示t时刻恢复者的数量;Λ表示单位时刻补充的数量,μ表示死亡率,α表示恢复率,γ为免疫失去率,Λ,μ,γ,α,λ,m都为正常数;β1是媒体报道前的接触率,β2是媒体报道后的接触率,由于报道不能完全阻止疾病的传播,所以β1≥β2>0;Bi(t)表示有滤波
${\left\{ {{\mathscr{F}_t}} \right\}_{t \ge 0}}$ 的完备概率空间(Ω,$\mathscr{F}$ ,${\left\{ {{\mathscr{F}_t}} \right\}_{t \ge 0}}$ ,$\mathbb{P}$ )上的标准布朗运动;σi表示白噪声强度,i=1,2,3.现实中,不仅传染病的传播会受到环境噪声的干扰,而且在传染病传播的过程中可能受到严重的环境扰动,如非典、洪水等.这些现象不可能用随机连续模型描述,进而引入Lévy跳来刻画这些现象.此外本文用更一般的函数(β1-β2f(I))SI来描述媒体报道的影响.
基于上面两点,在文献[6]的基础上,考虑带有Lévy噪声和媒体报道的随机SIRI模型:
其中:f(I)满足f′(I)≥0,f(0)=0,
$\underset{I+\infty }{\mathop{\text{lim}}}\, \text{ }f\left(I \right)=1$ ;X(t-)表示X(t)在t处的左极限;N(dt,dy)是有平稳分布v(dy)dt的泊松计数过程且$\widetilde{N}$ (dt,dy)=N(dt,dy)-v(dy)dt,${{\int }_{Y}}[\text{ln}(1+{{q}_{i}}\left(y \right))]v\left(\text{d}y \right)>-\infty $ ,${{\int }_{Y}}[{{q}_{i}}\left(y \right)-\text{ln}(1+{{q}_{i}}\left(y \right))]v\left(\text{d}y \right) < +\infty $ ,i=1,2,3;v定义在[0,∞)的可测子集Y上,且v(Y) < ∞;qi是Y×Ω (-1,+∞)上的连续有界函数,i=1,2,3.模型(2)中其他参数的定义与模型(1)中相同.
-
定理1 对于任意初值(S(0),I(0),R(0))T∈
$\mathbb{R}_{+}^{3}$ ,模型(2)存在唯一的全局正解(S(t),I(t),R(t))T,即对任意t∈[0,∞),(S(t),I(t),R(t))T∈$\mathbb{R}_{+}^{3}$ a. s.证 模型(2)的系数满足局部Lipschitz条件,对于任意的初值(S(0),I(0),R(0))T∈
$\mathbb{R}_{+}^{3}$ ,模型(2)在区间[0, τe)存在唯一局部解x(t)=(S(t),I(t),R(t))T,其中τe是爆破时刻.存在充分大的正整数k0,使得S(0),I(0)和R(0)都在区间$\left(\frac{1}{{{k}_{0}}}~, {{k}_{0}} \right)$ 内,对于所有的正整数k≥k0,定义停时此外,规定infØ=∞.显然{τk}是单调递增序列.设τ∞=limk +∞τk.易知τ∞≤τe.若能证明τ∞=∞ a. s.则τe=∞ a. s.且(S(t),I(t),R(t))T∈
$\mathbb{R}_{+}^{3}$ a. s.因此下面需证明τ∞=∞ a. s.假设τ∞ < ∞,则存在T∈(0,∞)和ε∈(0,1),使得P(τ∞≤T)>ε.令
$V(S, I, R)=\left(S-a-a\text{ln}\frac{S}{a} \right)+\left(I-1-\text{ln}I \right)+\left(R-1-\text{ln}R \right)$ ,其中a为待定正常数.由Itô公式[6]得其中
其中
${{K}_{1}}={{\int }_{Y}}\left[a{{q}_{1}}\left(y \right)-a\text{ln}\left(1+{{q}_{1}}\left(y \right) \right) \right]v\left(\text{d}y \right)+$ ${{\int }_{Y}}\left[{{q}_{2}}\left(y \right)-\text{ln}\left(1+{{q}_{2}}\left(y \right) \right) \right]v\left(\text{d}y \right)+{{\int }_{Y}}\left[{{q}_{3}}\left(y \right)-\text{ln}\left(1+{{q}_{3}}\left(y \right) \right) \right]v(\text{d}y)$ .取$a=\frac{\mu }{{{\beta }_{1}}}~$ ,则由(3)式得0≤EV(x(T∧τk))≤V(x(0))+KT.令Ωk={τk≤T}.当k≥ k0时,P(Ωk)>ε,并且有V(x(T∧τk))≥0.因此EV(x(T∧τk))≥E(1ΩkV(x(T∧τk))),其中1Ωk是Ωk的示性函数.对于任意ω∈Ωk,由停时的定义,S(τk,ω),I(τk,ω),R(τk,ω)中至少有一个等于k或
$\frac{\text{1}}{k}$ ,因此所以V(x(0))+KT≥E(1ΩkV(x(T∧τk)))P(Ωk)=EV(x(τk,ω))P(Ωk)≥Akε,当k→∞时,有∞>V(x(0))+KT=∞,矛盾,故假设不成立,即τ∞=∞ a. s.从而定理1得证.
-
模型(2)对应的确定性模型如下:
利用文献[8]中计算基本再生数的方法,易知模型(4)的基本再生数
${{R}_{0}}=\frac{{{\beta }_{1}}\mathit{\Lambda }\left(\mu +\gamma \right)}{{{\mu }^{2}}\left(\mu +\gamma +\alpha \right)}~$ .当R0≤1时,模型(4)仅存在无病平衡点${{\mathrm{E}}_{0}}=\left(\frac{\mathit{\Lambda }}{\mu }, 0, 0 \right)~$ ;当R0> 1时,模型(4)不仅存在无病平衡点${{\mathrm{E}}_{0}}=\left(\frac{\mathit{\Lambda }}{\mu }, 0, 0 \right)~$ ,还存在地方病平衡点E*=(S*,I*,R*).定理2 如果R0≤1,且
$-\mu +{{\sigma }_{1}}^{2}+3{{\int }_{Y}}{{q}_{1}}^{2}\left(y \right)v\left(\text{d}y \right) < 0$ ,$-\mu +\frac{1}{2}{{\sigma }_{i}}^{2}+\frac{3}{2}{{\int }_{Y}}{{q}_{i}}^{2}\left(y \right)v\left(\text{d}y \right) < 0$ ,i=2,3,那么对于任意初值(S(0),I(0),R(0))T∈$\mathbb{R}_{+}^{3}$ ,模型(2)的解x(t)=(S(t),I(t),R(t))T满足其中
$M=\{\text{min}~\mu -{{\sigma }_{1}}^{2}-3{{\int }_{Y}}{{q}_{1}}^{2}\left(y \right)v\left(\text{d}y \right)$ ,$\mu -\frac{1}{2}{{\sigma }_{2}}^{2}-\frac{3}{2}{{\int }_{Y}}{{q}_{2}}^{2}\left(y \right)v\left(\text{d}y \right)$ ,$\mu -\frac{1}{2}{{\sigma }_{3}}^{2}-\frac{3}{2}{{\int }_{Y}}{{q}_{3}}^{2}\left(y \right)v\left(\text{d}y \right)\text{ }\!\!\}\!\!\text{ }$ ,${{K}_{2}}={{\sigma }_{1}}^{2}~{{\left(\frac{\mathit{\Lambda }}{\mu } \right)}^{2}}+3{{\left(\frac{\mathit{\Lambda }}{\mu } \right)}^{2}}{{\int }_{Y}}{{q}_{1}}^{2}\left(y \right)v\left(\text{d}y \right)$ .证 令
${{V}_{1}}\left(S, I, R \right)=\frac{1}{2}\left(S-\frac{\mathit{\Lambda }}{\mu }+I+R \right){{~}^{2}}+{{a}_{1}}I+{{a}_{2}}R$ ,其中a1,a2为待定正常数.由Itô公式[6]得其中
取
${{a}_{1}}=\frac{2\mu }{{{\beta }_{1}}}$ ,${{a}_{2}}=\frac{2\mu \gamma }{{{\beta }_{1}}\left(\mu +\gamma \right)}~$ ,则易知
$0\le E{{V}_{1}}\left(x\left(t \right) \right)\le {{V}_{1}}\left(x\left(0 \right) \right)+E\int_{0}^{t}{~}\left(-M\left({{\left(S-\frac{\mathit{\Lambda }}{\mu } \right)}^{2}}+{{I}^{2}}+{{R}^{2}}+{{K}_{2}} \right) \right)\text{d}t$ .从而定理2得证.
记
定理3 如果R0>1且A>0,B>0,C>0,那么对于任意初值(S(0),I(0),R(0))T∈
$\mathbb{R}_{+}^{3}$ ,模型(2)的解x(t)=(S(t),I(t),R(t))T满足证 令
${{V}_{2}}\left(S, I, R \right)=\frac{1}{2}{{\left(S-{{S}^{*}}+I-{{I}^{*}}+R-{{R}^{*}} \right)}^{2}}+$ $\frac{p}{2}{{\left(S-{{S}^{*}}+I-{{I}^{*}} \right)}^{2}}+b\left(I-{{I}^{*}}-{{I}^{*}}\text{ln}~\frac{I}{{{I}^{*}}} \right)~+a\left(R-{{R}^{*}}-{{R}^{*}}\text{ln }\!\!~\!\!\text{ }\frac{R}{{{R}^{*}}} \right)$ ,其中a,b,p为待定正常数.由Itô公式[6]得其中
取
$a=\frac{\gamma {{R}^{*}}}{\alpha {{I}^{*}}}$ ,$p=\frac{2\mu }{\gamma }$ ,$b=\frac{2\mu }{\gamma }\cdot \frac{\gamma +2\mu +\alpha }{{{\beta }_{1}}-{{\beta }_{2}}f\left({{I}^{*}} \right)~}$ ,则易知
$0\le E{{V}_{2}}\left(x\left(t \right) \right)\le {{V}_{2}}\left(x\left(0 \right) \right)+E\int_{0}^{t}{{}}\left(-N\left({{\left(S-{{S}^{*}} \right)}^{2}}+{{\left(I-{{I}^{*}} \right)}^{2}}+{{\left(R-{{R}^{*}} \right)}^{2}} \right)+{{K}_{3}} \right))\text{d}t$ ,从而定理3得证.
注 在模型(2)中,令f(I)=
$\frac{\mathit{I}}{\mathit{m}\text{+}\mathit{I}}$ ,qi(y)=0,i=1,2,3,则模型(2)转化为模型(1).容易验证,定理2与3推广了文献[6]中的定理3.1与4.1.
-
本节利用Milsteins方法[9-10]来验证本文主要理论结果.
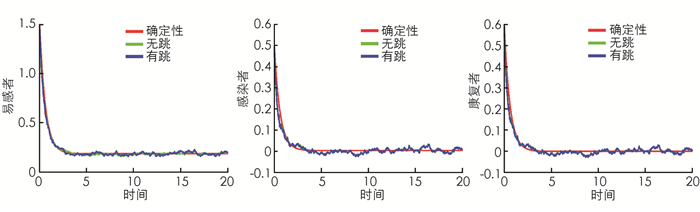
例1 对于模型(2),在无病平衡点附近,令初值S(0)=1.5,I(0)=0.5,R(0)=0.6,Λ=0.3,β1=0.005,β2=0.003,μ=0.2,α=0.043,γ=0.033,σ1=0.1,σ2=0.1,σ3=0.1,q1(y)=q2(y)=q3(y)=0.25,v=0.8,易得R0=0.04 < 1,且定理2的其他条件满足,因此定理2成立.如图 1所示.
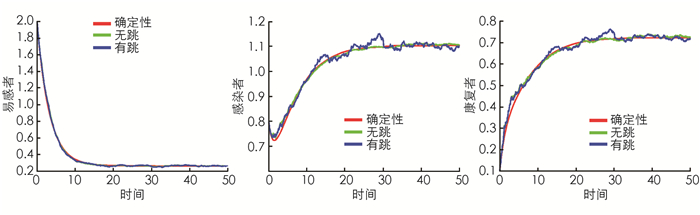
例2 对于模型(2),在地方病平衡点附近,令初值S(0)=2,I(0)=0.8,R(0)=0.1,Λ=0.3,β1=0.3,β2=0.25,μ=0.15,α=0.285 7,γ=0.285 7,σ1=0.02,σ2=0.01,σ3=0.02,q1(y)=q2(y)=q3(y)=0.15,v=0.05,易得R0=2.42>1,且定理3的其他条件满足,因此定理3成立.如图 2所示.
 DownLoad:
DownLoad: